Part Number: ADS1262
Hello
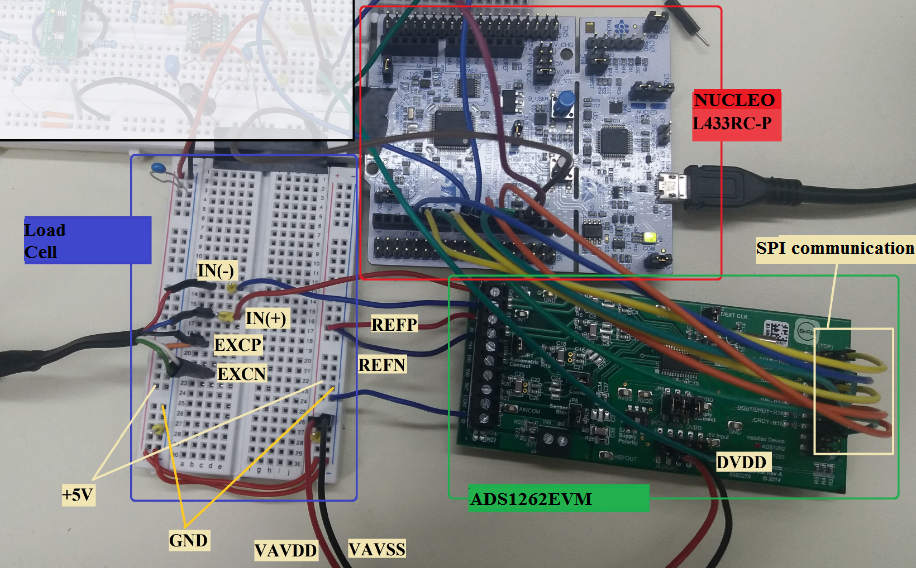
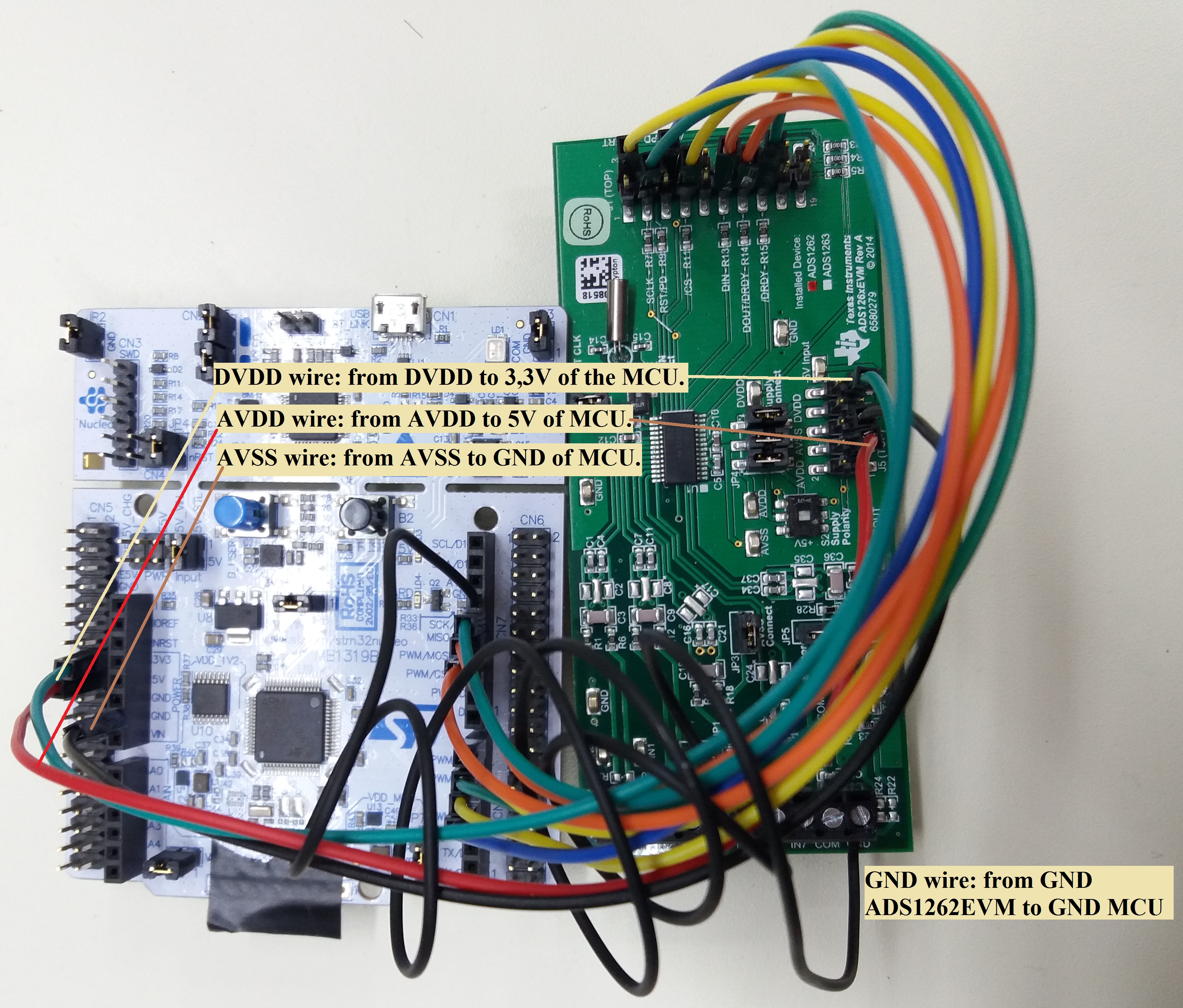
I´m using the ADS1262EVM to take measures of a load cell. I wanted to measure the real frequency at I was working and for that I measured the time that the ADC take in doing one conversion depending of the different frequencies of work (programming the MODE2 register).
Between 2.5 SPS and 400 SPS it was obtained a constant and equal value of time for all the measures, and the value of time was correspond to the programming frequency (f=1/t).
But from 400 SPS to 38400 SPS the values for each measure of time was different and seem as if they follow a system.
I insert a excel file with the collect data to see it better. The measure of times are in seconds (s).
I would like to know if it is normal or it is because this ADS1262 chip have some problem and works bad for this frequencies. And if it is normal the reasons of these responses of frequency.
Thanks in advance.
Best regards.