Hi Team,
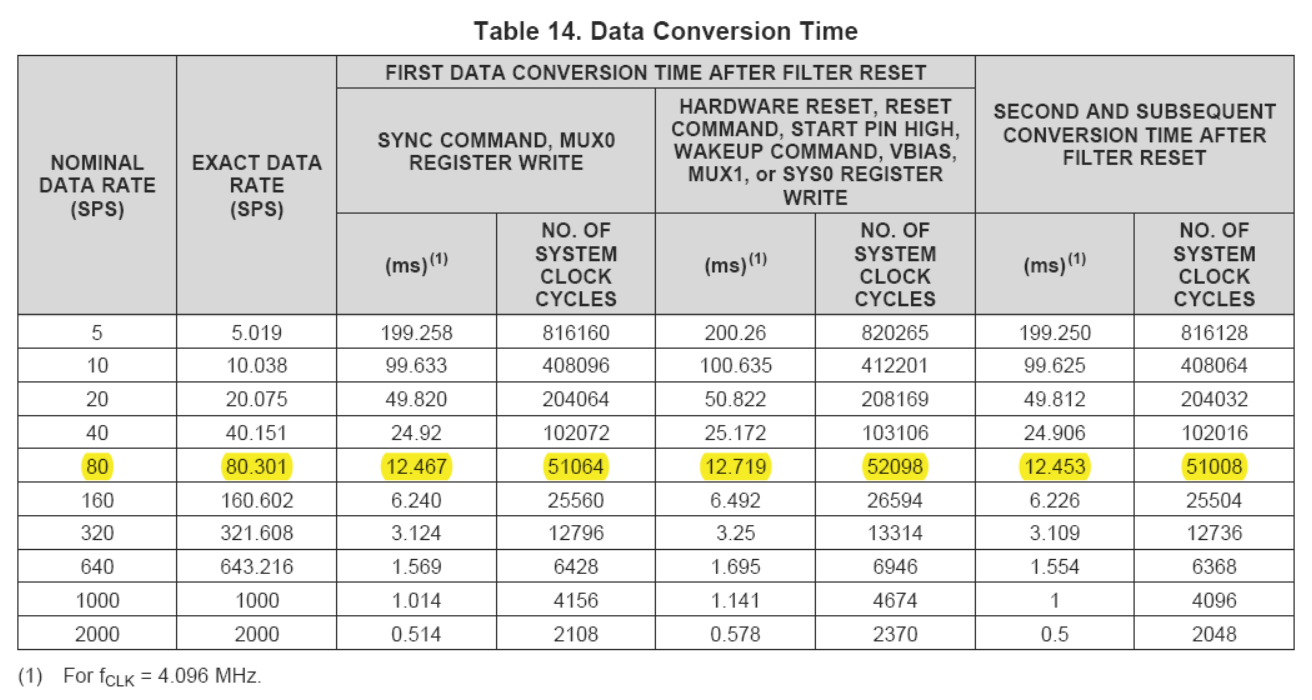
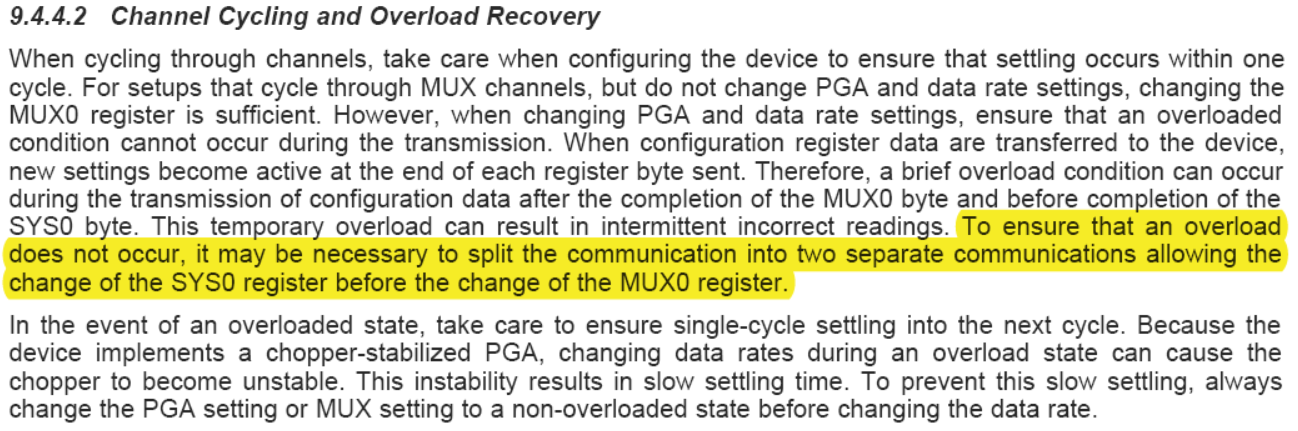
I am using ADS1248 for temperature measurement using an RTD. I am receiving data from ADS1248 successfully. But always my very first conversion result is showing a wrong value. I connected a fixed resistance of 100 ohm instead of RTD for debugging. As a result I am observing a value like '6467667' or '6568120' as my first result. Later on I am getting values like '6217041' or '62170248' as conversion results from ADS1248. After the first result, the result is stable at a value within range of '6200000' which is more correct. That is when converted back to resistance, values in this range is more close to 100 ohm. I am always getting first result in the range of '6400000' and later on the values will be in the range of '62000000'. I am attaching the code below. Can you please tell me what is happening here. Since if this happens for every first reading after an input channel change then it will be a large problem for my code.
//*****************************************************************************
// FILE NAME : C_138 SPI loop back Test.c
// DATE : 20.05.2020
// AUTHORS : Vineeth N
// DESCRIPTION : FOR TESTING SPI OF C_138 USING RTD
// CONTROLLER CARD : Contoller 138 control Board
//******************************************************************************
/* EXTERNAL CRYSTAL FREQUENCY 20MHz
*******************************************************************************/
//-----------------------------------------------------------------------------
// Include Header Files
// ----------------------------------------------------------------------------
#include"F28x_Project.h"
void main(void)
{
int32 r1 = 0x00000000, r2 = 0x00000000;
// Initiate system controls, GPIO pins, interrupt
InitSysCtrl();
InitGpio();
EALLOW;
GpioCtrlRegs.GPAGMUX1.bit.GPIO9 = 1;
GpioCtrlRegs.GPAMUX1.bit.GPIO9 = 3; // set Gpio pin 9 as SPI clock pin
GpioCtrlRegs.GPAPUD.bit.GPIO9 = 0; // Pull up enable
GpioCtrlRegs.GPAQSEL1.bit.GPIO9 = 3; // Qualifier Selection
GpioCtrlRegs.GPAGMUX1.bit.GPIO8 = 1;
GpioCtrlRegs.GPAMUX1.bit.GPIO8 = 3; // set Gpio pin 8 as SPI SIMO pin
GpioCtrlRegs.GPAPUD.bit.GPIO8 = 0; // Pull up enable
GpioCtrlRegs.GPAQSEL1.bit.GPIO8 = 3; // Qualifier Selection
GpioCtrlRegs.GPAGMUX1.bit.GPIO10 = 1;
GpioCtrlRegs.GPAMUX1.bit.GPIO10 = 3; // set Gpio pin 10 as SPI SOMI pin
GpioCtrlRegs.GPAPUD.bit.GPIO10 = 0; // Pull up enable
GpioCtrlRegs.GPAQSEL1.bit.GPIO10 = 3; // Qualifier Selection
GpioCtrlRegs.GPAGMUX1.bit.GPIO14 = 0;
GpioCtrlRegs.GPAMUX1.bit.GPIO14 = 0; // set Gpio pin 14 as GPIO output pin (CS/)
GpioCtrlRegs.GPADIR.bit.GPIO14 = 1; // set direction as output
GpioCtrlRegs.GPAGMUX1.bit.GPIO15 = 0;
GpioCtrlRegs.GPAMUX1.bit.GPIO15 = 0; // set Gpio pin 15 as GPIO output pin (START)
GpioCtrlRegs.GPADIR.bit.GPIO15 = 1; // set direction as output
GpioCtrlRegs.GPBGMUX1.bit.GPIO34 = 0;
GpioCtrlRegs.GPBMUX1.bit.GPIO34 = 0; // set Gpio pin 34 as GPIO output pin (ADC_RST)
GpioCtrlRegs.GPBDIR.bit.GPIO34 = 1; // set direction as output (ADC_RST)
GpioCtrlRegs.GPAGMUX1.bit.GPIO6 = 0; // IRQ_3
GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 0;
EDIS;
GpioDataRegs.GPACLEAR.bit.GPIO15 = 1; // START pin LOW
GpioDataRegs.GPASET.bit.GPIO14 = 1; // Clear CS/ pin to high
GpioDataRegs.GPBSET.bit.GPIO34 = 1; // ADC Reset disabled
// SpiaRegs.SPIFFTX.all = 0xE040;
// SpiaRegs.SPIFFRX.all = 0x2044;
// SpiaRegs.SPIFFCT.all = 0x0;
SpiaRegs.SPIFFTX.bit.SPIRST = 1; // SPI Reset. SPI FIFO can resume transmit or receive. No effect to the SPI registers bits.
SpiaRegs.SPIFFTX.bit.SPIFFENA = 1; // SPI FIFO Enhancements Enable
SpiaRegs.SPIFFTX.bit.TXFIFO = 1; // Release transmit FIFO from reset.
SpiaRegs.SPIFFTX.bit.TXFFINTCLR = 1; // TXFIFO Interrupt Clear. Write 1 to clear SPIFFTX[TXFFINT] flag
SpiaRegs.SPIFFTX.bit.TXFFIENA = 0; // TX FIFO interrupt based on TXFFIL match (less than or equal to) will be disabled.
SpiaRegs.SPIFFTX.bit.TXFFIL = 0; // A TX FIFO interrupt request is generated when there are no words remaining in the TX buffer
SpiaRegs.SPIFFRX.bit.RXFFOVFCLR = 1; // Receive FIFO Overflow Clear. Write 1 to clear SPIFFRX[RXFFOVF].
SpiaRegs.SPIFFRX.bit.RXFIFORESET = 1; // Re-enable receive FIFO operation.
SpiaRegs.SPIFFRX.bit.RXFFINTCLR = 1; // Receive FIFO Interrupt Clear. Write 1 to clear SPIFFRX[RXFFINT] flag
SpiaRegs.SPIFFRX.bit.RXFFIENA = 1; // RX FIFO interrupt based on RXFFIL match (greater than or equal to) will be disabled.
SpiaRegs.SPICCR.bit.SPISWRESET = 0; // clear software reset bit
SpiaRegs.SPICTL.bit.MASTER_SLAVE = 1; // master mode selected
SpiaRegs.SPICTL.bit.CLK_PHASE = 0; // clock phase selection
SpiaRegs.SPICCR.bit.CLKPOLARITY = 0; // clock polarity
SpiaRegs.SPIBRR.bit.SPI_BIT_RATE = 24; //(25MHz/25 = 1 MHz)
SpiaRegs.SPICCR.bit.SPICHAR = 15; // character per transfer
SpiaRegs.SPISTS.bit.INT_FLAG = 1; // clear interrupt flag
SpiaRegs.SPISTS.bit.OVERRUN_FLAG = 1; // clear over run flag
SpiaRegs.SPIPRI.bit.FREE = 1;
SpiaRegs.SPICCR.bit.SPILBK = 0; // loop back disable
SpiaRegs.SPICTL.bit.TALK = 1; // slave talk enabled
SpiaRegs.SPICTL.bit.SPIINTENA = 0; // interrupt disable
SpiaRegs.SPICCR.bit.SPISWRESET = 1; // software reset disabled
GpioDataRegs.GPACLEAR.bit.GPIO14 = 1; // Clear CS/ pin to low
GpioDataRegs.GPASET.bit.GPIO15 = 1; // Enable the device by setting START pin high
DELAY_US(1);
SpiaRegs.SPITXBUF = 0xFF06; // Send the RESET command and wait for 0.6ms
// while (SpiaRegs.SPIFFTX.bit.TXFFINT !=1 ); // Wait until TXFIFO is empty
// SpiaRegs.SPIFFTX.bit.TXFFINTCLR = 1; // TXFIFO Interrupt Clear. Write 1 to clear SPIFFTX[TXFFINT] flag
DELAY_US(600);
// Register configuration of ADS1248
SpiaRegs.SPITXBUF = 0x1640; // Send the SDATAC command and WREG Command 1st byte
SpiaRegs.SPITXBUF = 0x030A; // WREG Command 2nd byte and MUX0 register value
SpiaRegs.SPITXBUF = 0x0020; // VBIAS register value and MUX1 register value
SpiaRegs.SPITXBUF = 0x444A; // SYS0 register and WREG 1st command byte
SpiaRegs.SPITXBUF = 0x0105; // WREG 2nd command byte and IDAC0 register value
SpiaRegs.SPITXBUF = 0x0304; // IDAC1 register value and NOP command
// while (SpiaRegs.SPIFFTX.bit.TXFFINT !=1 ); // Wait until TXFIFO is empty
// SpiaRegs.SPIFFTX.bit.TXFFINTCLR = 1; // TXFIFO Interrupt Clear. Write 1 to clear SPIFFTX[TXFFINT] flag
while(SpiaRegs.SPIFFRX.bit.RXFFST < 7 );
DELAY_US(2);
GpioDataRegs.GPASET.bit.GPIO14 = 1; // Clear CS/ pin to high
while(1)
{
DELAY_US(13000);
GpioDataRegs.GPACLEAR.bit.GPIO14 = 1; // Clear CS/ pin to low
DELAY_US(1);
SpiaRegs.SPIFFRX.bit.RXFIFORESET = 0;
SpiaRegs.SPIFFRX.bit.RXFIFORESET = 1;
// Receive conversion result from ADS1248
SpiaRegs.SPITXBUF = 0xFF12; // NOP and RDATA
SpiaRegs.SPITXBUF = 0xFFFF; // NOP commands
SpiaRegs.SPITXBUF = 0xFF04; // NOP commands
while(SpiaRegs.SPIFFRX.bit.RXFFST < 3);
r1 = SpiaRegs.SPIRXBUF;
r1 = SpiaRegs.SPIRXBUF;
r1 = r1<<8;
r2 = SpiaRegs.SPIRXBUF;
r1 = r1|r2>>8;
DELAY_US(1);
GpioDataRegs.GPASET.bit.GPIO14 = 1; // Clear CS/ pin to high
}
}
Best Regards,
Vineeth N