Dear E2E Team / ADC
1. During ADC ads8685 configuration registers write and read operation:
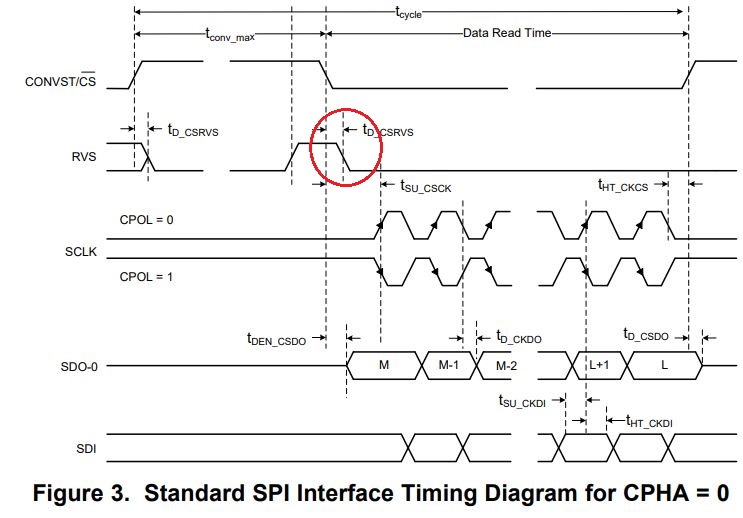
do we need to monitor the status of RVS signal before issuing the command for read and write or during change over from Read/Write to Conversion read?
3. While writing the configuration of register and read back in next call, result is not proper, need one more read, why? Whereas as per datasheet and blog details, during CS low to High, command get executed, that mean next read cycle data must be available (May be some delay can be given)
2. While Reading the data (conversion data), After RVS goes high and CS brings low by code, do we need to wait untill the RVS to fall low or low to High transition is sufficient? (Figure 1 and 3 of datasheet review C are mismatch in RVS timing).
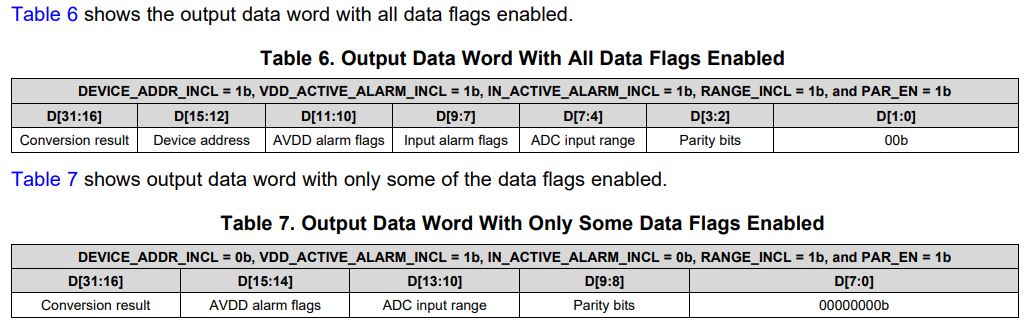
4. In Conversion result read, data available in 1st and 2nd byte of 32 bits read, it gives the impresion that these results are from previous conversion (i.e. one older than last one), Does my understanding wrong or right. How to read latest conversion instead of older one. This confusion is raised based on datasheet, NOP command (0x00) and Read_BYTE command (0x48).
5. How much time it will take from command write of Range Select followed CS high and data coverted availalble at output (new)?
I am considering that CS rising will finish current write instruction and also start data acqu and conversion phase automatically. I have special need to handle dynamic range control, by control of the range based on input signal for each sample, the maximum sampling rate will be 48KSPS. Does it feasible to do so, with SPI of 40 MHz. I am planning as follows: 1. Read Signal by MCU to get assessment of range and change the Input range of ADS8586 using SPI and Go for conversion cycle.
Regards