Part Number: ADS1148-Q1
Other Parts Discussed in Thread: TMS320F28377D, ADS1148
Hello all,
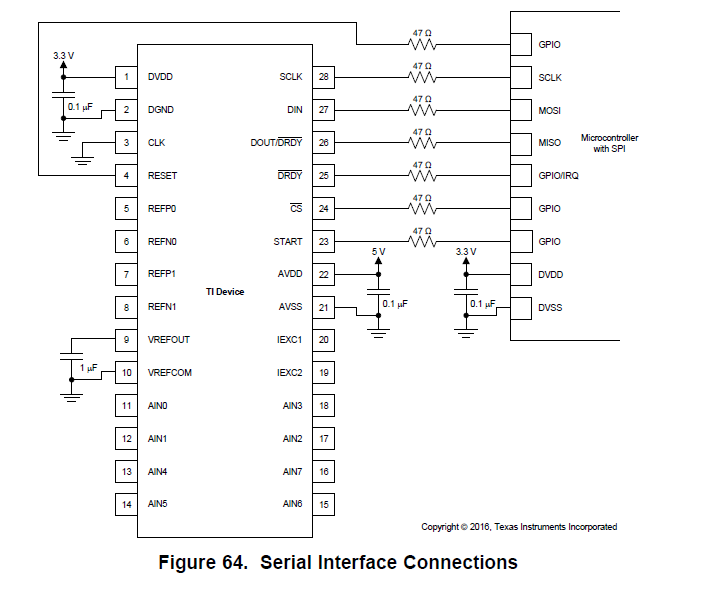
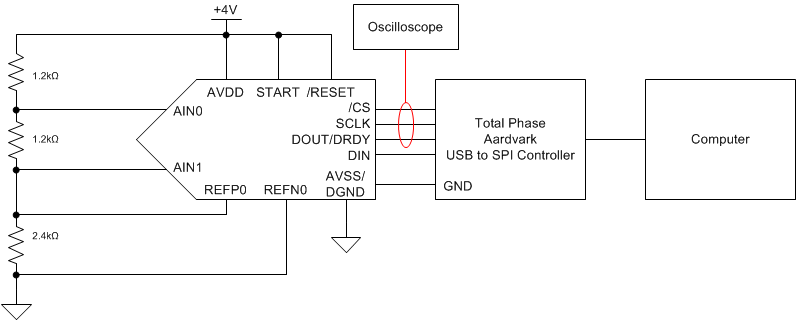
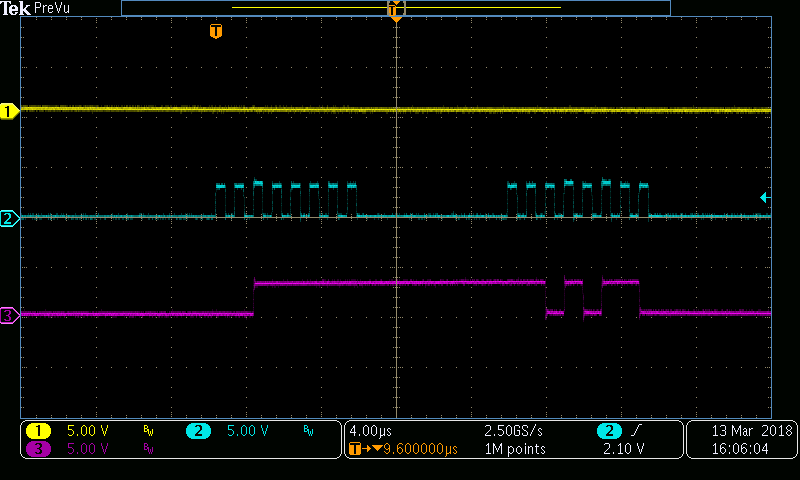
I am working on this ADC with TMS320F28377D for SPI communication. I am having issue in code as after sending read data command and clock command, I am getting the value '0' in results but it should be having the value of the applied input. Data ready interrupt is coming and commands are transferred accordingly. In the inputs I am applying 2.3V on AIN0 pin and 1.65V(Vcm) on AIN1 pin. Please help me with the issue below is attached the code.
//
#include "F28x_Project.h"
//
// Function Prototypes
//
interrupt void SPIA_TX_ISR(void);
interrupt void SPIA_RX_ISR(void);
void delay_loop(void);
void spi_init(void);
void error();
void SPITX_INTERRUPT_Service();
void adc_enable();
void Sdata_command();
void Wreg_command1();
void Wreg_command2();
void Wreg_command3();
void Wreg_command4();
void Wreg_command5();
void Wreg_command6();
void Rreg_command1();
void Rreg_command2();
void Sync();
int i, index, adc_flag, SPI_TX_RX, j, toggle=0;
void main(void)
{
//
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the F2837xD_SysCtrl.c file.
//
InitSysCtrl();
//
// Step 2. Initialize GPIO:
// This example function is found in the F2837xD_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
// Setup only the GP I/O only for SPI-A functionalitys
//
InitGpio();
GPIO_SetupPinMux(59, GPIO_MUX_CPU1, 0); //drdy 110
GPIO_SetupPinOptions(59, GPIO_INPUT, GPIO_PULLUP);
InitSpiaGpio();
XintRegs.XINT1CR.all = 0x0000; // XINT4 disable
XintRegs.XINT1CR.bit.POLARITY = 00; // 01: Interrupt is selected as positive edge triggered
XintRegs.XINT1CR.bit.ENABLE = 1;
InputXbarRegs.INPUT4SELECT = 40;
PieCtrlRegs.PIEIER1.bit.INTx4 = 0; //Disable XINT1 int.
PieCtrlRegs.PIEIFR1.all = 0;
// Step 3. Initialize PIE vector table:
// Disable and clear all CPU interrupts
//
DINT;
IER = 0x0000;
IFR = 0x0000;
//
// Initialize PIE control registers to their default state:
// This function is found in the F2837xD_PieCtrl.c file.
//
InitPieCtrl();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in F2837xD_DefaultIsr.c.
// This function is found in F2837xD_PieVect.c.
//
PieCtrlRegs.PIECTRL.bit.ENPIE = 0; // Enable the PIE block
PieCtrlRegs.PIEACK.all = 0xFFFF;
PieCtrlRegs.PIEIER6.bit.INTx1 = 1; // Enable PIE Group 6, INT 1
PieCtrlRegs.PIEIER6.bit.INTx2 = 1; // Enable PIE Group 6, INT 2
PieCtrlRegs.PIEIER1.bit.INTx4 = 1; // Enable PIE Group 1, INT 4
PieCtrlRegs.PIEIFR6.all = 0;
InitPieVectTable();
//
// Interrupts that are used in this example are re-mapped to
// ISR functions found within this file.
//
EALLOW;
// This is needed to write to EALLOW protected registers
PieVectTable.SPIA_RX_INT = &SPIA_RX_ISR;
PieVectTable.SPIA_TX_INT = &SPIA_TX_ISR;
EDIS;
// This is needed to disable write to EALLOW protected registers
//
// Step 4. Initialize the Device Peripherals:
//
spi_init(); // Initialize the SPI only
for (i = 0; i < 32000; i++);
GPIO_WritePin(19, 0);
// Enable Global Interrupts
//
// Step 5. User specific code, enable interrupts:
//
//
// Enable interrupts required for this example
IFR = 0x00;
IER = 0x21; // Enable CPU INT1, INT6
EINT;
PieCtrlRegs.PIEACK.all = 0xFFFF; //Clear all ACK bits before starting back ground loop.
for (i = 0; i < 32000; i++); //16ms
adc_flag=1;
index=1;
adc_enable();
//
// Step 6. IDLE loop. Just sit and loop forever (optional):
//
for (;;);
}
//
// error - Function to halt debugger on error
//
void error(void)
{
asm(" ESTOP0"); //Test failed!! Stop!
for (;;);
}
//
// spi_fifo_init - Initialize SPI FIFO
//
void spi_init()
{
EALLOW;
SpiaRegs.SPICCR.bit.SPISWRESET = 0; // 7 SPI SW Reset
SpiaRegs.SPICCR.bit.SPICHAR = 0x7; // Character length of 8-bits.To facilate insturction code and data bytes of EEPROM.
SpiaRegs.SPICCR.bit.SPILBK = 0; // 4 Loop-back is disable.
SpiaRegs.SPICCR.bit.CLKPOLARITY= 0; // 6 Data is shifted out on falling edge of clock.And recieved on
// rising edge of clk to make compatibility with EEPROM.
SpiaRegs.SPIBRR.all = 0x0063; // Baud rate
SpiaRegs.SPICTL.bit.SPIINTENA = 1; // 0 Interrupts(SPIRXINT & SPITXINT)are enable.
SpiaRegs.SPICTL.bit.TALK = 1; // 1 Slave transmit is enable for EEPROM but must be
// stop in case of DAC writting or donot read Rx for DAC.
SpiaRegs.SPICTL.bit.MASTER_SLAVE = 1; // 2 SPI work as master.
SpiaRegs.SPICTL.bit.CLK_PHASE = 1; // 3 Output Data on clock.
SpiaRegs.SPICTL.bit.OVERRUNINTENA= 0; // 4 Overrun interrupt is Disable as there is complete control on EEPROM. and no data from DAC.
SpiaRegs.SPIRXEMU = 0x0000; // Dummy of SPIRXBUF clear to zero.
SpiaRegs.SPITXBUF = 0x0000; // SPITXBUF clear to zero.
SpiaRegs.SPIRXBUF = 0x0000; // SPIRXBUF clear to zero.
SpiaRegs.SPIDAT = 0x0000; // clear initially to zero.
SpiaRegs.SPIFFTX.bit.SPIFFENA = 0; //FIFo Feature is Disabled.
SpiaRegs.SPIPRI.bit.FREE = 1; // 4 Free emulation mode control is selected.
SpiaRegs.SPIPRI.bit.SOFT = 1; // 5 Soft emulation mode control is selected.
SpiaRegs.SPICCR.bit.SPISWRESET = 1; // 7 SPI SW Out of reset.
EDIS;
}
//
// spiTxFifoIsr - ISR for SPI transmit FIFO
//
interrupt void SPIA_TX_ISR(void)
{}
void SPITX_INTERRUPT_Service()
{
j = SpiaRegs.SPITXBUF; // TRANSMIT data
if (index == 1 && adc_flag == 1)
{
adc_enable();
}
else if (index == 2)
{
Sdata_command();
}
else if (index == 3)
{
Wreg_command1(); // Address of first register
}
else if (index == 4)
{
Wreg_command2(); // Number of bytes to be written
}
else if (index == 5)
{
Wreg_command3();
}
else if (index == 6)
{
Wreg_command4();
}
else if (index == 7)
{
Wreg_command5();
}
else if (index == 8)
{
Wreg_command6();
}
else if (index == 9)
{
Rreg_command1();
}
else if (index == 10)
{
Rreg_command2();
}
else if (index == 11)
{
Sync();
}
}
void adc_enable()
{
//GPIO_WritePin(51, 1); //Start pin of ADC is applied 3.3v directly
asm(" NOP");
asm(" NOP");
asm(" NOP");
GPIO_WritePin(19, 0); // Set CS low
asm(" NOP");
asm(" NOP");
asm(" NOP");
//GPIO_WritePin(49, 0); //Reset pin of ADC is applied 3.3v directly
SPI_TX_RX = 1;
SpiaRegs.SPIDAT = 0x06;
index = 2;
}
void Sdata_command()
{
for (i = 0; i < 12000; i++); //0.6 ms
SpiaRegs.SPIDAT = 0x16; // SDATAC command
index = 3;
}
void Wreg_command1()
{
SpiaRegs.SPIDAT = 0x40;
index = 4;
}
void Wreg_command2()
{
SpiaRegs.SPIDAT = 0x03;
index = 5;
}
void Wreg_command3()
{
SpiaRegs.SPIDAT = 0x01;
index = 6;
}
void Wreg_command4()
{
SpiaRegs.SPIDAT = 0;
index = 7;
}
void Wreg_command5()
{
SpiaRegs.SPIDAT = 0;
index = 8;
}
void Wreg_command6()
{
SpiaRegs.SPIDAT = 0x04;
index = 9;
}
void Rreg_command1()
{
SpiaRegs.SPIDAT = 0x20;
index = 10;
}
void Rreg_command2()
{
SpiaRegs.SPIDAT = 0x03;
index = 11;
}
void Sync()
{
SpiaRegs.SPIDAT = 0x04;
for (i = 0; i < 40; i++); //1.78 us
index = 12;
}
interrupt void SPIA_RX_ISR(void)
{
i = SpiaRegs.SPIRXBUF; // Read data
if (SPI_TX_RX == 0)
{}
else
{
SPITX_INTERRUPT_Service();
}
SpiaRegs.SPIFFRX.bit.RXFFOVFCLR = 1; // Clear Overflow flag
SpiaRegs.SPIFFRX.bit.RXFFINTCLR = 1; // Clear Interrupt flag
if(toggle ==1)
{
toggle = 2;
SpiaRegs.SPIDAT = 0; // Read for clock
}
PieCtrlRegs.PIEACK.bit.ACK6 = 1;
}
interrupt void XINT1_ISR(void)
{
PieCtrlRegs.PIEACK.bit.ACK1 = 1;
GPIO_WritePin(19, 0);
asm(" NOP");
asm(" NOP");
asm(" NOP");
if(toggle == 0)
{
toggle = 1;
SpiaRegs.SPIDAT = 0x12; //READ
}
else if(toggle == 2)
{
toggle = 0;
}
asm(" NOP");
asm(" NOP");
asm(" NOP");
for (i = 0; i < 40; i++);
}
Regards,
Ami