Other Parts Discussed in Thread: TMS570LC4357, , MSP430FR6989, TMS570LS1224,
Hi Teams,
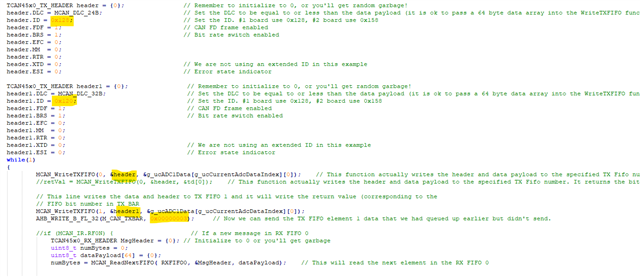
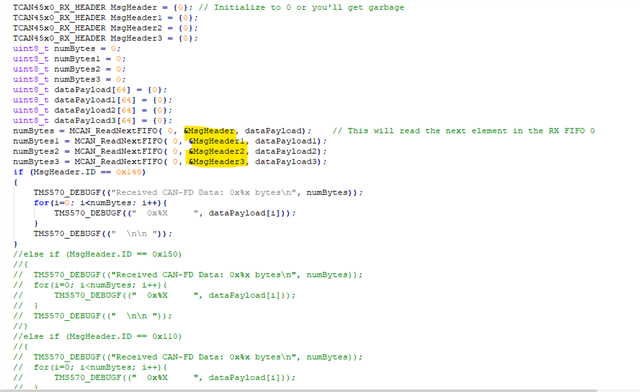
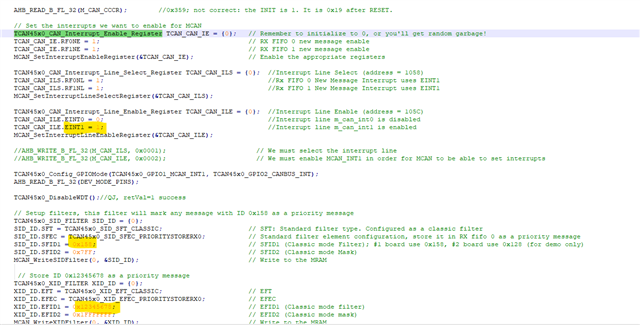
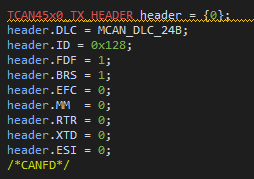
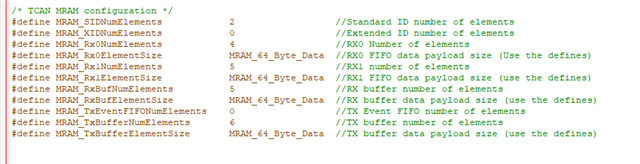
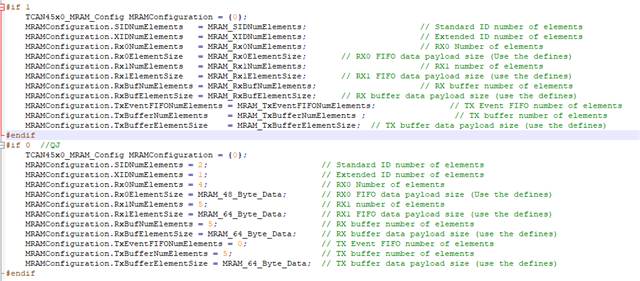
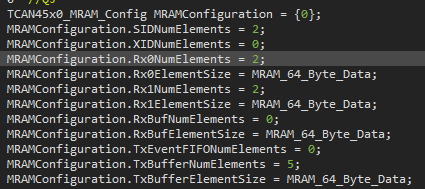
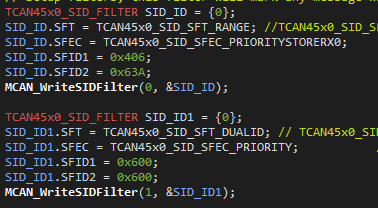
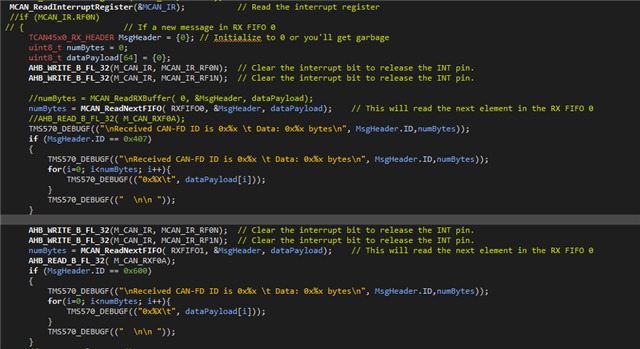
I need a support for TCAN4550 BOOSTXL - CANFD-LIN configuration to Transmit and receive CANFD with TMS570LC4357.
The interrupt method is working fine in Launchpad but I need to checking with polling method or interrupt method with only nINT pin for my custom board.
nINT -- GIOB[6]
CAN_RST -- N2HET1[11]
SPI3_NCS0
SPI3_SIMO
SPI3_SOMI
SPI3_CLK
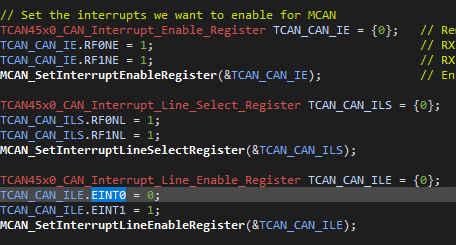
Is it must to use the CAN_GPIO1_INT and CAN_GPIO2_INT in TCAN4550 ?
GIOA[0] - CAN_GPIO1_INT and GIOA[1] - CAN_GPIO2_INT
Any example code for TMS570LCx MCU for polling method without using nINT.
and interrupt method using only nINT not CAN_GPIO1_INT and CAN_GPIO2_INT in TCAN4550?
Thanks in advance.