Hi all,
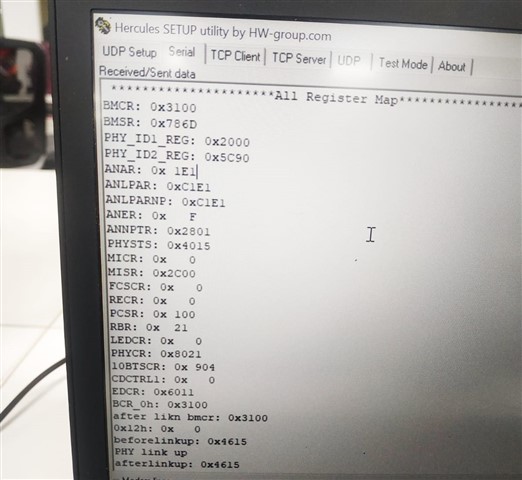
i am making dp83848vii interface with lpc54so18 and i changed phy and i am getting link status and autonogation but ping is not getting and i read all the register values are below (using lwipstack)
please help me to solve this
/*
* Copyright (c) 2016, Freescale Semiconductor, Inc.
* Copyright 2016-2017 NXP
* All rights reserved.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
#include "fsl_phy.h"
#include "fsl_debug_console.h"
/*******************************************************************************
* Definitions
******************************************************************************/
/*! @brief Defines the timeout macro. */
#define PHY_TIMEOUT_COUNT 0xFFFFFFU
volatile unsigned int loop;
/*******************************************************************************
* Prototypes
******************************************************************************/
/*!
* @brief Get the ENET instance from peripheral base address.
*
* @param base ENET peripheral base address.
* @return ENET instance.
*/
extern uint32_t ENET_GetInstance(ENET_Type *base);
/*******************************************************************************
* Variables
******************************************************************************/
#if !(defined(FSL_SDK_DISABLE_DRIVER_CLOCK_CONTROL) && FSL_SDK_DISABLE_DRIVER_CLOCK_CONTROL)
/*! @brief Pointers to enet clocks for each instance. */
#if defined(FSL_FEATURE_SOC_ENET_COUNT) && (FSL_FEATURE_SOC_ENET_COUNT > 0)
extern clock_ip_name_t s_enetClock[FSL_FEATURE_SOC_ENET_COUNT];
#elif defined(FSL_FEATURE_SOC_LPC_ENET_COUNT) && (FSL_FEATURE_SOC_LPC_ENET_COUNT > 0)
extern clock_ip_name_t s_enetClock[FSL_FEATURE_SOC_LPC_ENET_COUNT];
#endif
#endif /* FSL_SDK_DISABLE_DRIVER_CLOCK_CONTROL */
/*******************************************************************************
* Code
******************************************************************************/
status_t PHY_Init(ENET_Type *base, uint32_t phyAddr, uint32_t srcClock_Hz) {
uint32_t regPHY, Afterlink, CDCTRL1;
uint32_t idReg = 0;
uint32_t delay = PHY_TIMEOUT_COUNT;
uint32_t instance = ENET_GetInstance(base);
bool status = false;
#if !(defined(FSL_SDK_DISABLE_DRIVER_CLOCK_CONTROL) && FSL_SDK_DISABLE_DRIVER_CLOCK_CONTROL)
/* Set SMI first. */
CLOCK_EnableClock(s_enetClock[instance]);
#endif /* FSL_SDK_DISABLE_DRIVER_CLOCK_CONTROL */
#if defined(FSL_FEATURE_SOC_ENET_COUNT) && (FSL_FEATURE_SOC_ENET_COUNT > 0)
ENET_SetSMI(base, srcClock_Hz, false);
#elif defined(FSL_FEATURE_SOC_LPC_ENET_COUNT) && (FSL_FEATURE_SOC_LPC_ENET_COUNT > 0)
ENET_SetSMI(base);
#endif
/* Initialization after PHY stars to work. */
uint32_t idReg1 = 0, idReg2 = 0, auto_4h = 0, auto_5h = 0, BCR_0h = 0,
reg3 = 0, beforelinkup = 0, afterlinkup = 0, add14_h = 0, bmcr = 0,
reset = 0, msir = 0, bmcr1, PHY_RESET;
PHY_Read(base, phyAddr, PHY_BASICCONTROL_REG, &bmcr1);
PRINTF(" initially -> 0x00U: 0x%04X\n", bmcr1);
/* Reset first. */
SYSCON->PRESETCTRL[2] = SYSCON_PRESETCTRL_ETH_RST_MASK;
SYSCON->PRESETCTRL[2] &= ~SYSCON_PRESETCTRL_ETH_RST_MASK;
PHY_Read(base, phyAddr, 0x19U, ®PHY);
PRINTF("BEFORE LINKUP 0x19U: 0x%04X\n", regPHY);
PHY_Read(base, phyAddr, 0x1BU, &CDCTRL1);
PRINTF("before LINKUP 0x1B: 0x%04X\n", CDCTRL1);
PHY_Read(base, phyAddr, PHY_ID1_REG, &idReg1);
PHY_Read(base, phyAddr, PHY_ID2_REG, &idReg2);
PRINTF("PHY_ID1_REG: 0x%04X\n", idReg1);
PRINTF("PHY_ID2_REG: 0x%04X\n", idReg2);
if (((idReg1 << 16) | (idReg2 & 0xFFF0)) == 0x20005C90) {
PRINTF("it is DP83848\n");
} else if (((idReg1 << 16) | (idReg2 & 0xFFF0)) == PHY_CONTROL_ID1) {
PRINTF("it is LAN8720\n");
}
// while ((idReg != PHY_CONTROL_ID1) && (delay != 0)) {
// PHY_Read(base, phyAddr, PHY_ID1_REG, &idReg);
// PRINTF("PHY_ID1_REG: 0x%04X\n", idReg);
// delay--;
// }
// PRINTF("PHY_CONTROL_ID1 pass \n");
// if (!delay) {
// return kStatus_Fail;
// }
delay = PHY_TIMEOUT_COUNT;
// /* Reset PHY and wait until completion. */
// PHY_Write(base, phyAddr, PHY_BASICCONTROL_REG, PHY_BCTL_RESET_MASK);
// do {
// PHY_Read(base, phyAddr, PHY_BASICCONTROL_REG, &PHY_RESET);
// } while (delay-- && PHY_RESET & PHY_BCTL_RESET_MASK);
//
// if (!delay) {
// return kStatus_Fail;
// }
// PRINTF("reset pass \n");
/* Set the ability. */
// PHY_Write(base, phyAddr, PHY_AUTONEG_ADVERTISE_REG,
// (PHY_ALL_CAPABLE_MASK | 0x1U));
//PRINTF("base address pass \n");
/* Start Auto negotiation and wait until auto negotiation completion */
// PHY_Write(base, phyAddr, PHY_BASICCONTROL_REG,
// (PHY_BCTL_AUTONEG_MASK | PHY_BCTL_RESTART_AUTONEG_MASK));
// Put DP83848C PHY into reset mode
PHY_Write(base, phyAddr, PHY_BASICCONTROL_REG, 0x8000);
// Loop until hardware reset completes
for (loop = 0; loop < 0x100000; loop++) {
PHY_Read(base, phyAddr, PHY_BASICCONTROL_REG, &reset);
if (!(reset & 0x8000)) {
PRINTF(" Reset has completed \n");
loop = 0;
// Reset has completed
break;
}
}
PHY_Read(base, phyAddr, 0x04U, &auto_4h);
PHY_Read(base, phyAddr, 0x05U, &auto_5h);
PRINTF("auto_4h: 0x%04X\n", auto_4h);
PRINTF("auto_5h: 0x%04X\n", auto_5h);
PHY_Write(base, phyAddr, PHY_BASICCONTROL_REG, 0x3300U);
PHY_Read(base, phyAddr, PHY_BASICCONTROL_REG, &bmcr);
PRINTF("bmcr: 0x%04X\n", bmcr);
int count = 0;
for (loop = 0; loop < 0x100000; loop++) {
PHY_Read(base, phyAddr, PHY_BASICSTATUS_REG, ®3);
if (count < 10)
PRINTF("0x3300U: 0x%04X\n", reg3);
count++;
if (reg3 & 0x0020) {
PRINTF(" Autonegotiation has completed \n");
// Autonegotiation has completed
break;
}
}
/*****************************all register value********************************/
#if 0
PRINTF(" *********************All Register Map******************************************************************\n");
uint32_t ANAR_R=0,ANLPAR_R=0,ANLPARNP_R1=0,ANER_R=0,ANNPTR_R=0,PHYSTS_R=0,MICR_R=0,MISR_R=0,FCSCR_R=0,RECR_R=0,PCSR_R=0,RBR_R=0,LEDCR_R=0,PHYCR_R=0,BTSCR_10=0,CDCTRL1_R=0,EDCR_R=0;
PHY_Read(base, phyAddr, PHY_BASICCONTROL_REG, &bmcr);
PRINTF("BMCR: 0x%04X\n", bmcr);
PHY_Read(base, phyAddr, PHY_BASICSTATUS_REG, ®3);
PRINTF("BMSR: 0x%04X\n", reg3);
PHY_Read(base, phyAddr, PHY_ID1_REG, &idReg1);
PHY_Read(base, phyAddr, PHY_ID2_REG, &idReg2);
PRINTF("PHY_ID1_REG: 0x%04X\n", idReg1);
PRINTF("PHY_ID2_REG: 0x%04X\n", idReg2);
PHY_Read(base, phyAddr, 0x04U, &ANAR_R);
PRINTF("ANAR: 0x%04X\n", ANAR_R);
PHY_Read(base, phyAddr, 0x05U, &ANLPAR_R);
PRINTF("ANLPAR: 0x%04X\n", ANLPAR_R);
PHY_Read(base, phyAddr, 0x05U, &ANLPARNP_R1);
PRINTF("ANLPARNP: 0x%04X\n", ANLPARNP_R1);
PHY_Read(base, phyAddr, 0x06U, &ANER_R);
PRINTF("ANER: 0x%04X\n", ANER_R);
PHY_Read(base, phyAddr, 0x07U, &ANNPTR_R);
PRINTF("ANNPTR: 0x%04X\n", ANNPTR_R);
PHY_Read(base, phyAddr, 0x10U, &PHYSTS_R);
PRINTF("PHYSTS: 0x%04X\n", PHYSTS_R);
PHY_Read(base, phyAddr, 0x11U, &MICR_R);
PRINTF("MICR: 0x%04X\n", MICR_R);
PHY_Read(base, phyAddr, 0x12U, &MISR_R);
PRINTF("MISR: 0x%04X\n", MISR_R);
PHY_Read(base, phyAddr, 0x14U, &FCSCR_R);
PRINTF("FCSCR: 0x%04X\n", FCSCR_R);
PHY_Read(base, phyAddr, 0x15U, &RECR_R);
PRINTF("RECR: 0x%04X\n", RECR_R);
PHY_Read(base, phyAddr, 0x16U, &PCSR_R);
PRINTF("PCSR: 0x%04X\n", PCSR_R);
PHY_Read(base, phyAddr, 0x17U, &RBR_R);
PRINTF("RBR: 0x%04X\n", RBR_R);
PHY_Read(base, phyAddr, 0x18U, &LEDCR_R);
PRINTF("LEDCR: 0x%04X\n", LEDCR_R);
PHY_Read(base, phyAddr, 0x19U, &PHYCR_R);
PRINTF("PHYCR: 0x%04X\n", PHYCR_R);
PHY_Read(base, phyAddr, 0x1AU, &BTSCR_10);
PRINTF("10BTSCR: 0x%04X\n", BTSCR_10);
PHY_Read(base, phyAddr, 0x1BU, &CDCTRL1_R);
PRINTF("CDCTRL1: 0x%04X\n", CDCTRL1_R);
PHY_Read(base, phyAddr, 0x1DU, &EDCR_R);
PRINTF("EDCR: 0x%04X\n", EDCR_R);
#endif
PHY_Read(base, phyAddr, PHY_BASICCONTROL_REG, &BCR_0h);
PRINTF("BCR_0h: 0x%04X\n", BCR_0h);
PRINTF("after likn bmcr: 0x%04X\n", bmcr);
PHY_Read(base, phyAddr, 0x12U, &msir);
PRINTF("0x12h: 0x%04X\n", msir);
//int count=0;
// delay = PHY_TIMEOUT_COUNT;
// do {
// PHY_Read(base, phyAddr, PHY_BASICSTATUS_REG, ®);
// if(count<10)
// PRINTF("PHY_ID1_REG: 0x%04X\n", reg);
//
// count++;
// delay--;
// } while (delay && ((reg & PHY_SPECIALCTL_AUTONEGDONE_MASK) == 0));
//
// PRINTF("auto negotiation completion pass \n");
// if (!delay) {
// return kStatus_Fail;
// }
/* Waiting a moment for phy stable. */
PHY_Read(base, phyAddr, PHY_SEPCIAL_CONTROL_REG, &beforelinkup);
PRINTF("beforelinkup: 0x%04X\n", beforelinkup);
for (delay = 0; delay < PHY_TIMEOUT_COUNT; delay++) {
__ASM("nop");
PHY_GetLinkStatus(base, phyAddr, &status);
if (status) {
PRINTF("PHY link up\n");
break;
}
}
PHY_Read(base, phyAddr, PHY_SEPCIAL_CONTROL_REG, &afterlinkup);
PRINTF("afterlinkup: 0x%04X\n", afterlinkup);
PHY_Read(base, phyAddr, 0x14U, &add14_h);
PRINTF("add14_h: 0x%04X\n", add14_h);
PHY_Read(base, phyAddr, 0x19U, &Afterlink);
PRINTF("AFTER LINKUP 0x19U: 0x%04X\n", Afterlink);
PHY_Read(base, phyAddr, 0x1BU, &CDCTRL1);
PRINTF("AFTER LINKUP 0x1B: 0x%04X\n", CDCTRL1);
// for(int i=0;i<20;i++)
// {
//
// //PHY_Read(base, phyAddr, PHY_SEPCIAL_CONTROL_REG, &add14_h);
// //PRINTF("add14_h: 0x%04X\n", add14_h);
// PHY_Read(base, phyAddr, PHY_SEPCIAL_CONTROL_REG, &afterlinkup);
// PRINTF("afterlinkup: 0x%04X\n", afterlinkup);
// for(int j=0;j<10000000;j++);
//
// }
PRINTF("ALL Operation close \n");
for (int j = 0; j < 20000000; j++)
;
// PHY_Read(base, phyAddr, 0x14U, &add14_h);
PRINTF("afterlinkup: 0x%04X\n", afterlinkup);
// PRINTF("add14_h: 0x%04X\n", add14_h);
return kStatus_Success;
}
status_t PHY_Write(ENET_Type *base, uint32_t phyAddr, uint32_t phyReg,
uint32_t data) {
#if defined(FSL_FEATURE_SOC_ENET_COUNT) && (FSL_FEATURE_SOC_ENET_COUNT > 0)
uint32_t counter;
/* Clear the SMI interrupt event. */
ENET_ClearInterruptStatus(base, ENET_EIR_MII_MASK);
/* Starts a SMI write command. */
ENET_StartSMIWrite(base, phyAddr, phyReg, kENET_MiiWriteValidFrame, data);
/* Wait for SMI complete. */
for (counter = PHY_TIMEOUT_COUNT; counter > 0; counter--)
{
if (ENET_GetInterruptStatus(base) & ENET_EIR_MII_MASK)
{
break;
}
}
/* Check for timeout. */
if (!counter)
{
return kStatus_PHY_SMIVisitTimeout;
}
/* Clear MII interrupt event. */
ENET_ClearInterruptStatus(base, ENET_EIR_MII_MASK);
#elif defined(FSL_FEATURE_SOC_LPC_ENET_COUNT) && (FSL_FEATURE_SOC_LPC_ENET_COUNT > 0)
ENET_StartSMIWrite(base, phyAddr, phyReg, data);
while (ENET_IsSMIBusy(base))
;
#endif
return kStatus_Success;
}
status_t PHY_Read(ENET_Type *base, uint32_t phyAddr, uint32_t phyReg,
uint32_t *dataPtr) {
#if defined(FSL_FEATURE_SOC_ENET_COUNT) && (FSL_FEATURE_SOC_ENET_COUNT > 0)
assert(dataPtr);
uint32_t counter;
/* Clear the MII interrupt event. */
ENET_ClearInterruptStatus(base, ENET_EIR_MII_MASK);
/* Starts a SMI read command operation. */
ENET_StartSMIRead(base, phyAddr, phyReg, kENET_MiiReadValidFrame);
/* Wait for MII complete. */
for (counter = PHY_TIMEOUT_COUNT; counter > 0; counter--)
{
if (ENET_GetInterruptStatus(base) & ENET_EIR_MII_MASK)
{
break;
}
}
/* Check for timeout. */
if (!counter)
{
return kStatus_PHY_SMIVisitTimeout;
}
/* Get data from MII register. */
*dataPtr = ENET_ReadSMIData(base);
/* Clear MII interrupt event. */
ENET_ClearInterruptStatus(base, ENET_EIR_MII_MASK);
#elif defined(FSL_FEATURE_SOC_LPC_ENET_COUNT) && (FSL_FEATURE_SOC_LPC_ENET_COUNT > 0)
ENET_StartSMIRead(base, phyAddr, phyReg);
while (ENET_IsSMIBusy(base))
;
*dataPtr = ENET_ReadSMIData(base);
#endif
return kStatus_Success;
}
status_t PHY_GetLinkStatus(ENET_Type *base, uint32_t phyAddr, bool *status) {
uint32_t reg;
status_t result = kStatus_Success;
/* Read the basic status register. */
result = PHY_Read(base, phyAddr, PHY_SEPCIAL_CONTROL_REG, ®);
if (result == kStatus_Success) {
if (reg & PHY_BSTATUS_LINKSTATUS_MASK) {
/* link up. */
*status = true;
} else {
*status = false;
}
}
return result;
}
status_t PHY_GetLinkSpeedDuplex(ENET_Type *base, uint32_t phyAddr,
phy_speed_t *speed, phy_duplex_t *duplex) {
assert(duplex);
assert(speed);
uint32_t reg;
status_t result = kStatus_Success;
/* Read the control two register. */
result = PHY_Read(base, phyAddr, PHY_SEPCIAL_CONTROL_REG, ®);
if (result == kStatus_Success) {
if (reg & PHY_SPECIALCTL_DUPLEX_MASK) {
/* Full duplex. */
*duplex = kPHY_FullDuplex;
} else {
/* Half duplex. */
*duplex = kPHY_HalfDuplex;
}
if (reg & PHY_SPECIALCTL_100SPEED_MASK) {
/* 100M speed. */
*speed = kPHY_Speed100M;
} else { /* 10M speed. */
*speed = kPHY_Speed10M;
}
}
return result;
}