


Other Parts Discussed in Thread: MOTORWARE
Hello,
I have a CAN network composed of three nodes - VN1630 interface from Vector, and then two other nodes with the SN65HVD256 transceivers. I can communicate with each one individually (Vector to SN65HVD256) perfectly fine with no errors, but when I try to add all three nodes in the system, one message gets through and then my CANbus crashes.
Busload when communicating with just one node is 5%. When all three nodes are in the system, busload shoots up to 72% as shown in the image attached.

All cables are twisted pair and the bus is terminated on the Vector connector and on one of the PCBs in the node (split termination with cap). Below is my CAN interface circuit on each node

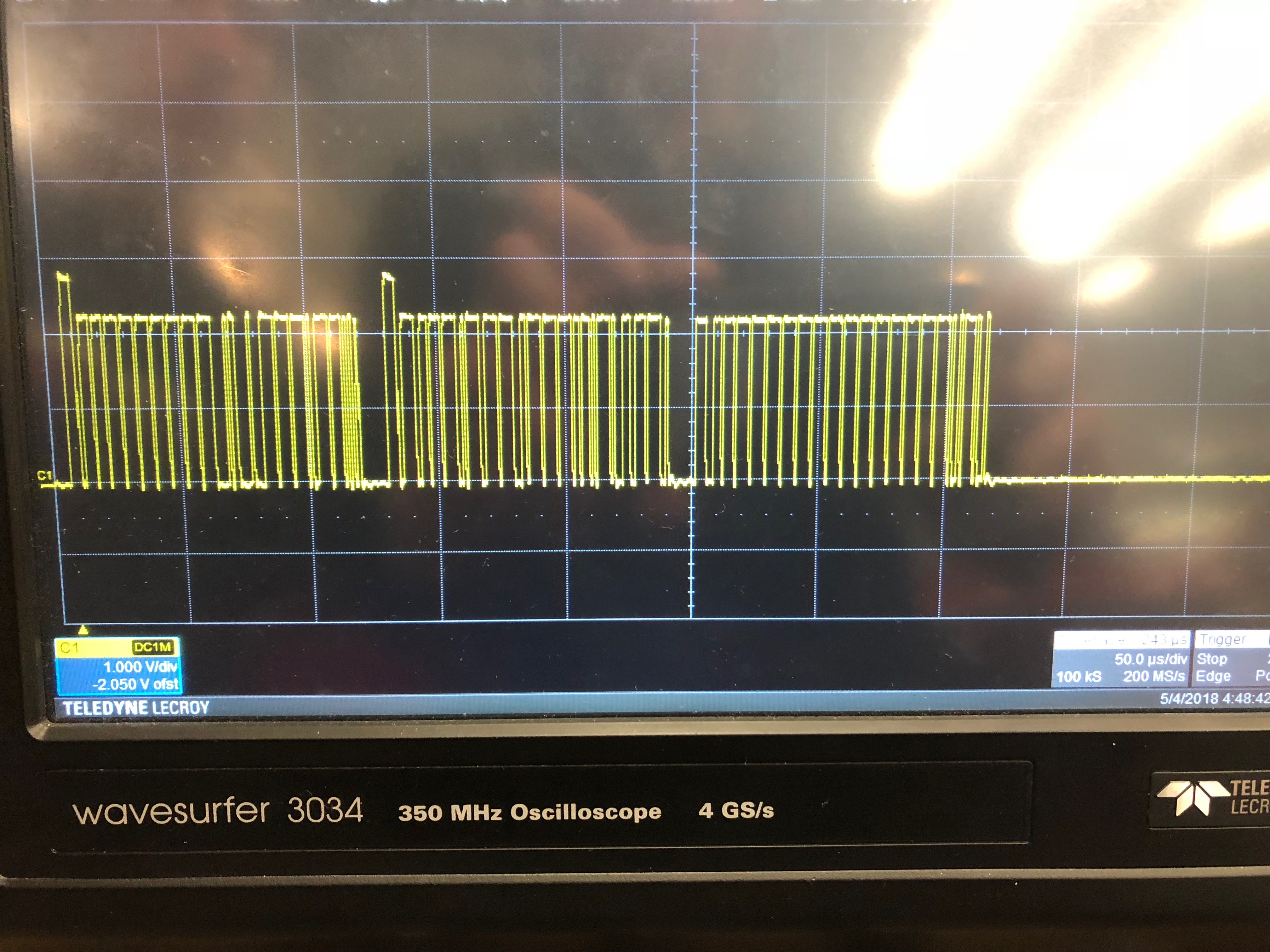
I measured the differential signal between CANL and CANH and captured this. I'm not sure why those two spikes exist and if they're related to the problem. They seem a bit strange to me since I thought there is supposed to a 2V differential in the dominant state, not ~2.8V. Any ideas?
I thought this was a problem related to arbitration, but the person who set up the CAN architecture has ensured me that all IDs are different.
Any insight as to what might be going on would be greatly appreciated. Thanks!
Jason

