Other Parts Discussed in Thread: AWR1443,
Hi,
I am using AWR1443 development board for my application. For CAN communication 1443 uses SN65HVDA540 IC.
CAN communication was fine. But suddenly without any change in hardware as well as in software side CAN communication is failing.
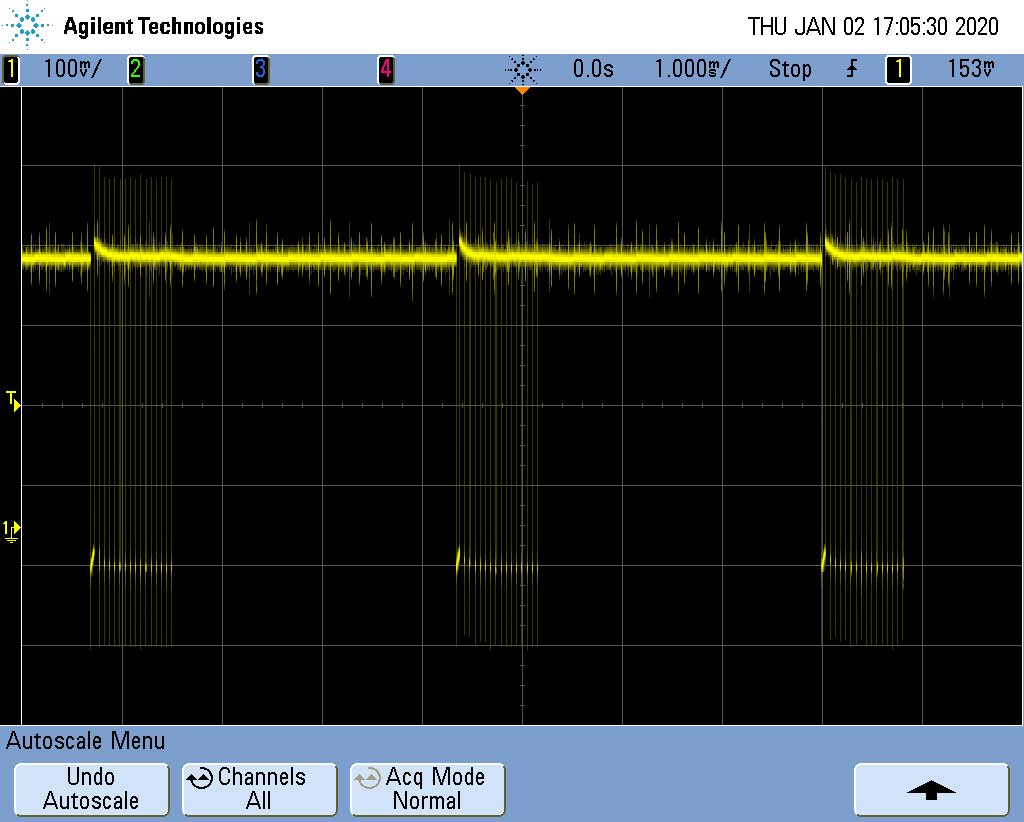
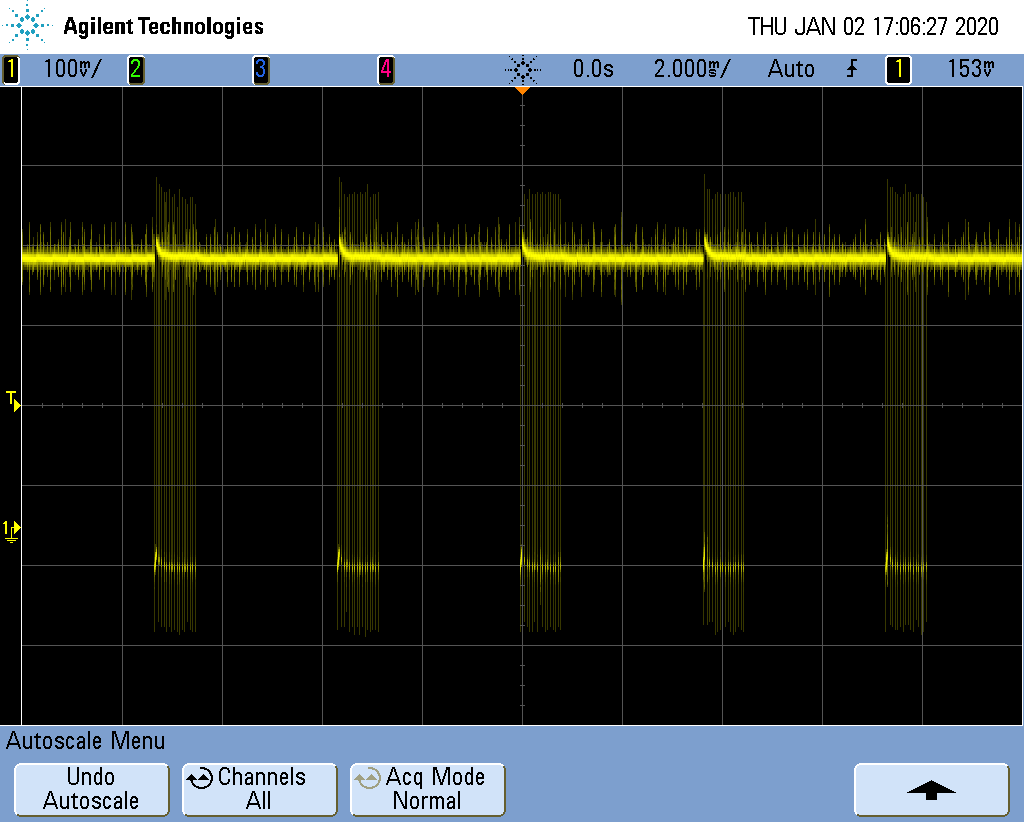
I have confirmed that SN65HVDA540 is getting inputs from 1443 with oscilloscope till board goes into BUSoff state, but at output side there is constant voltage which means nothing in CAN's language.I checked hardware side too. Everything is fine. So I doubt that may be SN65HVDA540 IC is not responding.
Is there anything like SN65HVDA540 goes into sleep mode due to some reasons and then never responds?
Is there way to trigger IC to make it work? Is there any way by which I can say surely that IC is not responding properly?
IC is actually made for harsh environment. So there is very less possibility of IC dying.
I even went through datasheet of SN65HVDA540, but didn't get much useful information that can help in debugging.
Regards,
Rajeshwari