Hello,
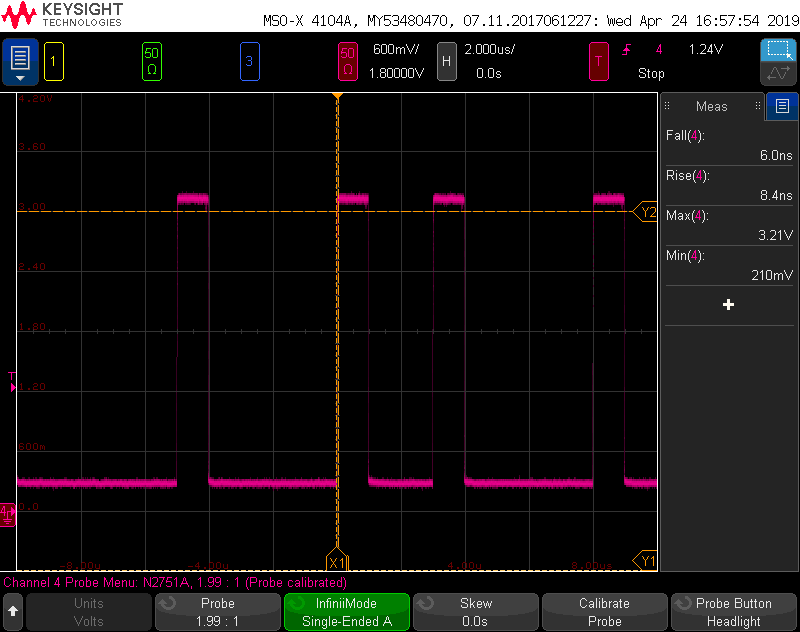
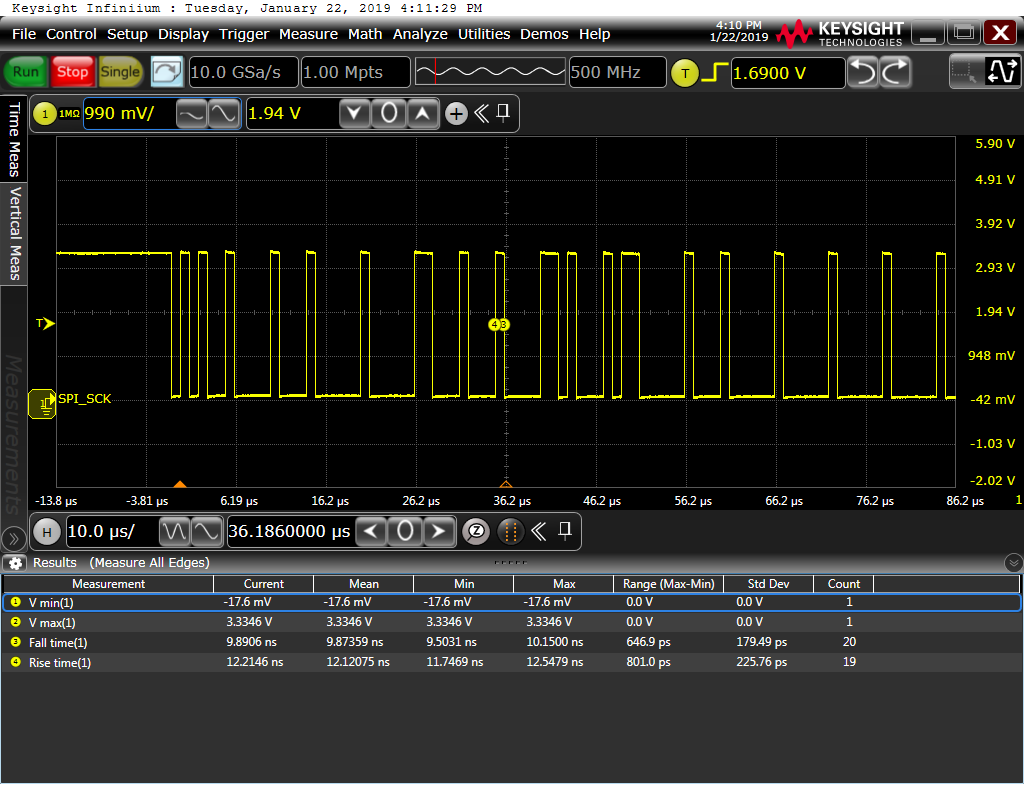
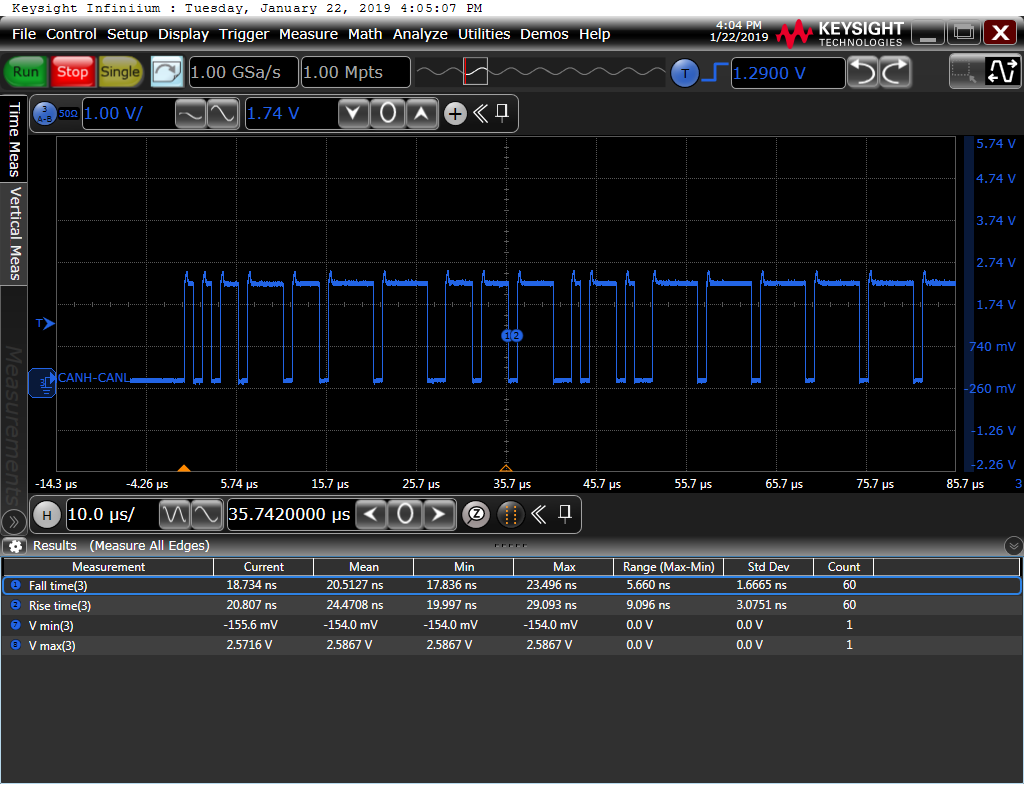
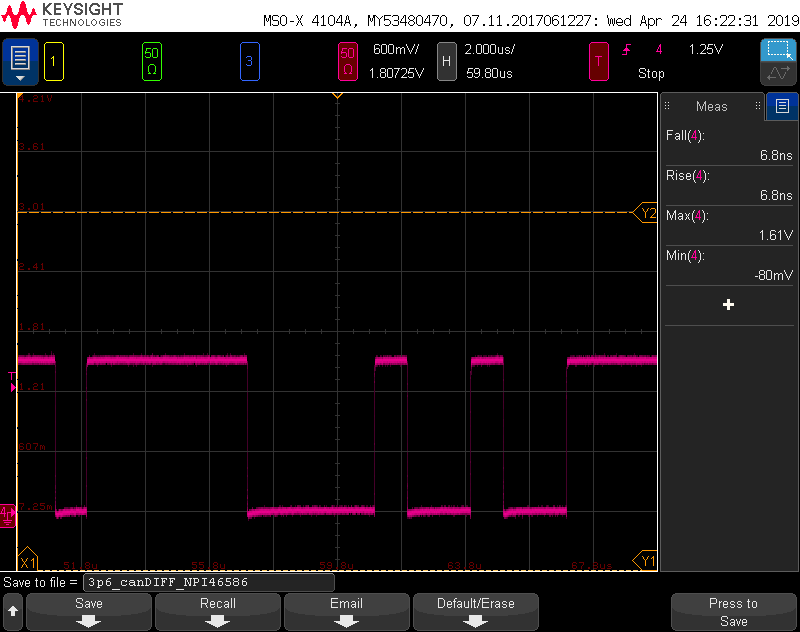
Datasheet states typical values for the RXD switching characteristics. I specifically interested in the fall and rise times. What are the maximum and minimum values?
Thank you,
Karen
Hello,
Datasheet states typical values for the RXD switching characteristics. I specifically interested in the fall and rise times. What are the maximum and minimum values?
Thank you,
Karen