Other Parts Discussed in Thread: TMS320F28379D, TMS320F28388D
For running the can_external_transmit on 28379d I am using two TCAN1042DEVM transceivers. The connections are as shown below: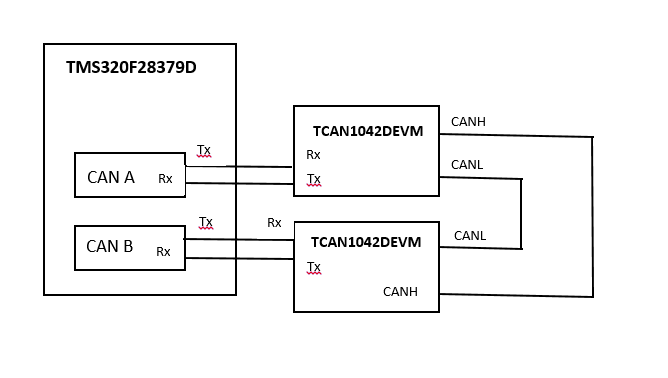
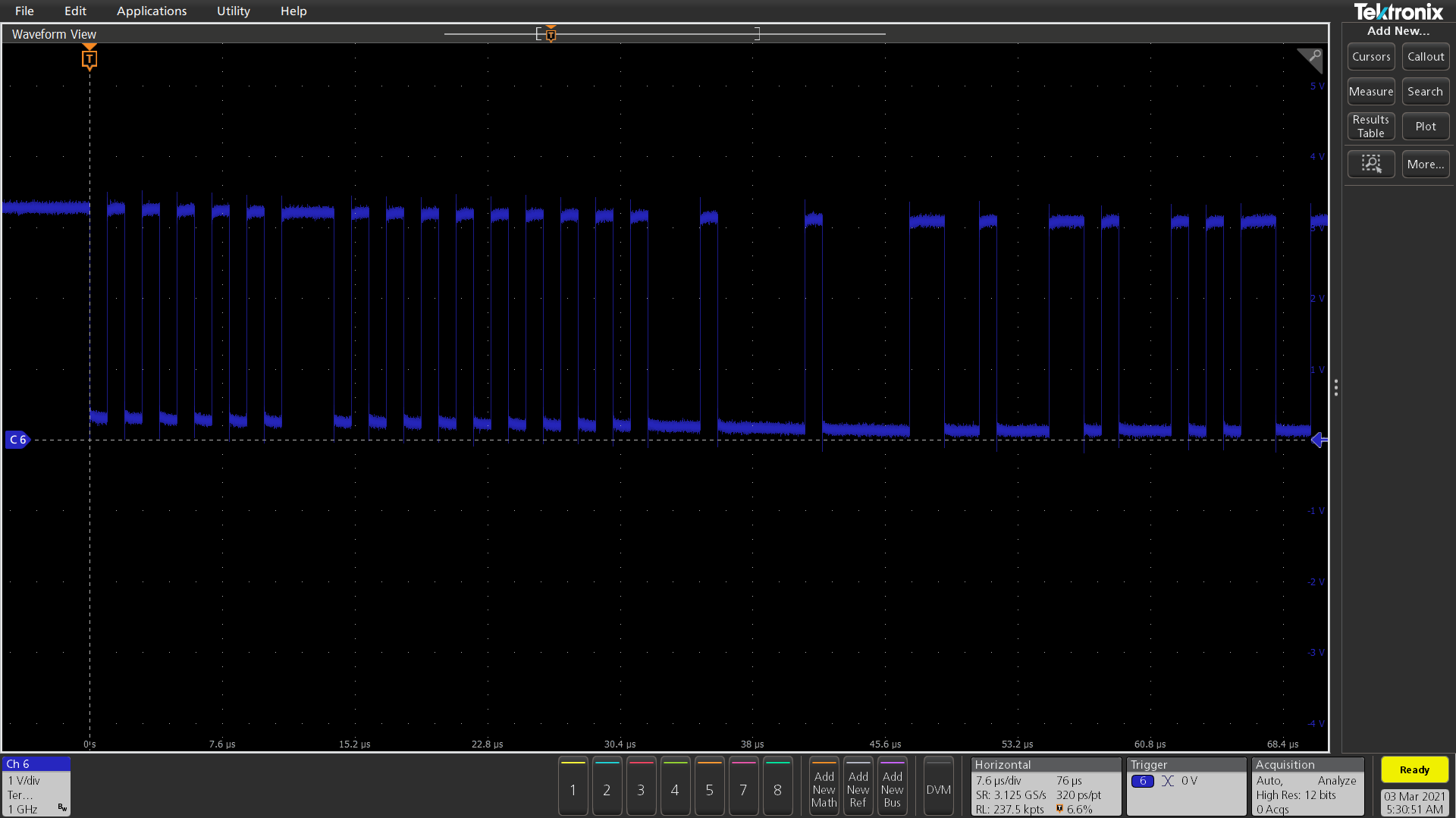
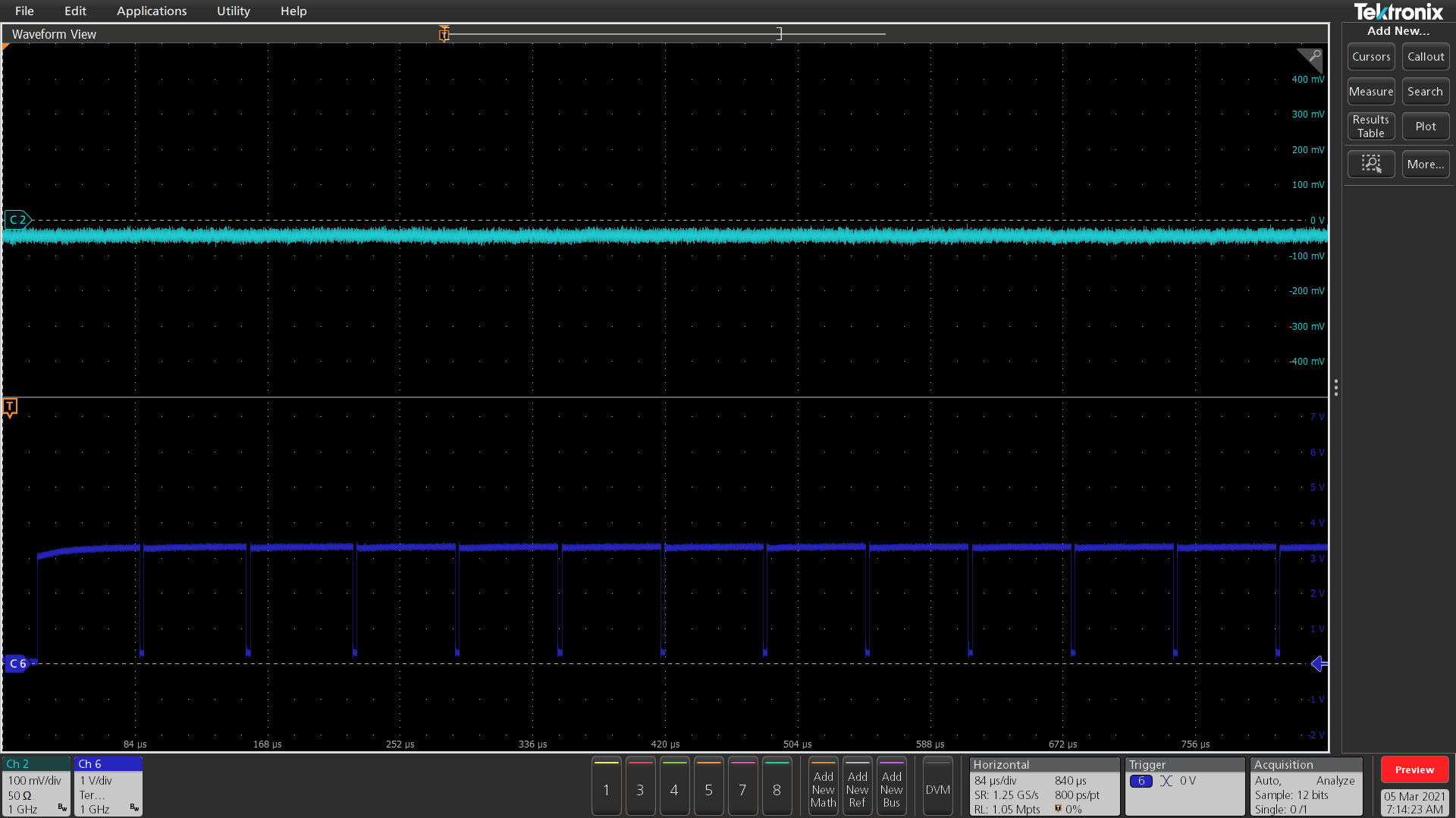
I have configured the GPIOs properly but do not see any receive operation and the errorFlag gets set. What are the configurations that are needed on these TCAN1042DEVM for this to work?