Other Parts Discussed in Thread: TCAN4550
Hi,
I’m currently working on a project that needs to read voltage states from different GPIO ports and send message through CAN to our device,
For the 2nd version of our ECU I have to add a function to read CAN data from our device,
I finished the reading part from editing the TCAN demo code and it works, but I will get data that is wrong in some of the frames,
The CAN ID I want to read is 0x275, and most of the time I get the correct data
But I will get a frame of data that all 8 bytes of the message is “0” but the message ID
This is the CAN message that I send every 100ms, ID:0x275 and the data in the message won’t change

Most of the time I get the correct data from the array dataPayload[]
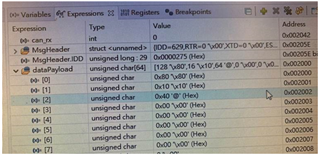
But some moment I will get an array full of zeros with the correct ID while I didn’t change the data that I send

I copy this code from TCAN DEMO and add my functions at line 121.
I need to read byte 0 and byte 2 of message ID 0x275 and if the data is all 0 I will get wrong results
I can avoid the problem with ignoring the data that are all zero
But I want to check with you to see if my code miss any settings that cause this problem
Thanks for your help!
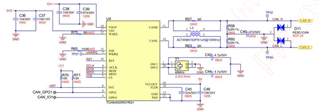
SCH as below