I want to measure the pulse wave width with LaunchPad 28379 Board .
In the begining, I use EPWM1A as input signal(to gpio26). I am sure my coding is correct.
And the result as show below(Fig1 Fig2). The green wave is the input signal to gpio26. And purple wave is TSCTR in Ecap1. I use DAC to observe.
Also all the situation is correct.When detect the falling edge, the counter is reset. Otherwise, the counter is continue to counting until detect falling edge.
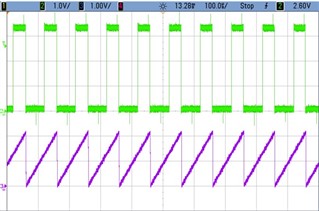
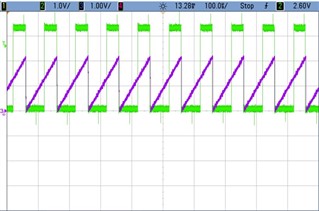
Fig1. Fig2.
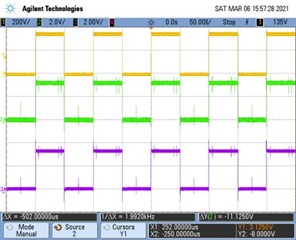
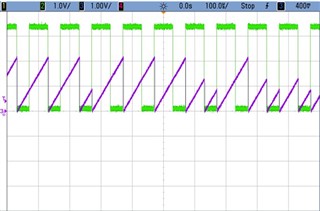
But because I want to measure wave which is isolated. So I use Ti IC iso7741. And circuit set up picture as below picture.
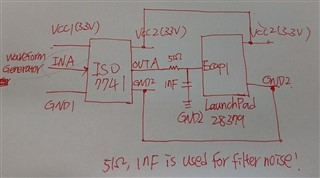
Also I use an oscilloscope to observe the waveform. Green waveform is input signal to gpio26(after 51+1nF signal).And purple waveform is TSCTR in Ecap1 which use DAC to observe.
And the result as show below. The rising edge and falling edge always detect error result.
Could you give me some suggestion:?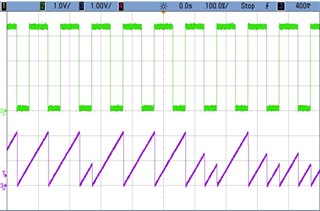
#include "F28x_Project.h"
#include <math.h>
Uint32 ECap1IntCount;
Uint32 ECap1PassCount;
Uint32 Ecap1ct1;
Uint32 Ecap1ct2;
Uint32 Ecap1ct4;
Uint32 Ecap1ct5;
Uint32 TSCTR1;
int j_Ecap1 =0;
float Ecap1duty;
int ready1=0;
int maincounter=0;
int mainarray=0;
float DVan;
float DVbn;
float DVcn;
float Vab;
float Vca;
float Vbc;
float Va;
float Vb;
float Vc;
//------------------------fundamental wave-----------------------
float theta=0;
float Comp1_EME=0;
float Comp2_EME=0;
float Comp3_EME=0;
#define frequency 60
#define Vd 0
#define Vq 3
#define REFERENCE_VREFHI 1
#define REFERENCE_VREF 1
#define DACA 1
#define DACB 2
#define DACC 3
#define REFERENCE REFERENCE_VREFHI
#define DAC_NUM DACA
volatile struct DAC_REGS* DAC_PTR[4] = {0x0,&DacaRegs,&DacbRegs,&DaccRegs};
//=====================DCA==============
//
// Function Prototypes
//
__interrupt void ecap1_isr(void);
__interrupt void thetaplus(void);
void InitECapture1(void);
void Fail(void);
void ConfigureGPIO(void);
void InitEPwm1Example(void);
void InitEPwm2Example(void);
void InitEPwm3Example(void);
void InitEPwm4Example(void);
void GPIOQua(void);
//
// Main
//
void main(void)
{
InitSysCtrl();
InitEPwm3Gpio();
InitECap1Gpio(26);
GPIO_SetupPinOptions(26, GPIO_INPUT, GPIO_SYNC);
GPIOQua();
ConfigureDAC(DAC_NUM);
ConfigureDAC(DACB);
ConfigureGPIO();
DINT;
InitPieCtrl();
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
EALLOW;
PieVectTable.ECAP1_INT = &ecap1_isr;
PieVectTable.EPWM1_INT = &thetaplus;
EDIS;
InitECapture1();
ECap1IntCount = 0;
ECap1PassCount = 0;
IER |= M_INT3;
IER |= M_INT4;
//
// Enable eCAP INTn in the PIE: Group 3 __interrupt 1-6
//
PieCtrlRegs.PIEIER4.bit.INTx1 = 1;
PieCtrlRegs.PIEIER4.bit.INTx2 = 1;
PieCtrlRegs.PIEIER4.bit.INTx3 = 1;
PieCtrlRegs.PIEIER3.bit.INTx1 = 1;
EALLOW;
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC = 0;//?
CpuSysRegs.PCLKCR2.bit.EPWM1=1;
CpuSysRegs.PCLKCR2.bit.EPWM2=1;
CpuSysRegs.PCLKCR2.bit.EPWM3=1;
CpuSysRegs.PCLKCR2.bit.EPWM4=1;
CpuSysRegs.PCLKCR2.bit.EPWM5=1;
EDIS;
InitEPwm1Example();
InitEPwm2Example();
InitEPwm3Example();
InitEPwm4Example();
EALLOW;
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC =1;
EDIS;
EINT;
ERTM;
for(;;)
{
TSCTR1=ECap1Regs.TSCTR;
DAC_PTR[DAC_NUM]->DACVALS.all =(TSCTR1*0.15);
DAC_PTR[DACB]->DACVALS.all =(TSCTR1*0.15);
Comp1_EME = cos(theta) * Vd+ -sin(theta) * Vq;
Comp2_EME = cos(theta - 2.0943951023931953) * Vd + -sin(theta - 2.0943951023931953) * Vq;
Comp3_EME = cos(theta + 2.0943951023931953) * Vd + -sin(theta + 2.0943951023931953) * Vq;
EPwm2Regs.CMPA.bit.CMPA = (10.0 + Comp1_EME) * 0.05 * 5000.0;
EPwm2Regs.CMPB.bit.CMPB = (10.0 + Comp1_EME) * 0.05 * 5000.0+100.0;
EPwm3Regs.CMPA.bit.CMPA = (10.0 + Comp2_EME) * 0.05 * 5000.0;
EPwm3Regs.CMPB.bit.CMPB = (10.0 + Comp2_EME) * 0.05 * 5000.0+100.0;
EPwm4Regs.CMPA.bit.CMPA = (10.0 + Comp3_EME) * 0.05 * 5000.0;
EPwm4Regs.CMPB.bit.CMPB = (10.0 + Comp3_EME) * 0.05 * 5000.0+100.0;
//GpioDataRegs.GPACLEAR.bit.GPIO18 = 1;
}
}
void InitECapture1()
{
ECap1Regs.ECEINT.all = 0x0000; // Disable all capture __interrupts
ECap1Regs.ECCLR.all = 0xFFFF; // Clear all CAP __interrupt flags
ECap1Regs.ECCTL1.bit.CAPLDEN = 0; // Disable CAP1-CAP4 register loads
ECap1Regs.ECCTL2.bit.TSCTRSTOP = 0; // Make sure the counter is stopped
//
// Configure peripheral registers
//
ECap1Regs.ECCTL2.bit.CONT_ONESHT = 1; // One-shot
ECap1Regs.ECCTL2.bit.STOP_WRAP = 1; // Stop at 2 events
ECap1Regs.ECCTL2.bit.SWSYNC = 1; //同步所有的Ecap時鐘
ECap1Regs.ECCTL1.bit.CAP1POL = 0; // Risingedge
ECap1Regs.ECCTL1.bit.CAP2POL = 1; // Falling edge
ECap1Regs.ECCTL1.bit.CTRRST1 = 0; //Abs
ECap1Regs.ECCTL1.bit.CTRRST2 = 1; // Difference operation
ECap1Regs.ECCTL2.bit.SYNCI_EN = 1; // Enable sync in
ECap1Regs.ECCTL2.bit.SYNCO_SEL = 0; // Pass through
ECap1Regs.ECCTL1.bit.CAPLDEN = 1; // Enable capture units
ECap1Regs.ECCTL2.bit.TSCTRSTOP = 1; // Start Counter
ECap1Regs.ECCTL2.bit.REARM = 1; // arm one-shot
ECap1Regs.ECCTL1.bit.CAPLDEN = 1; // Enable CAP1-CAP4 register loads
ECap1Regs.ECEINT.bit.CEVT2 = 1; // 2 events = __interrupt
}
__interrupt void ecap1_isr(void)
{
GpioDataRegs.GPASET.bit.GPIO18 = 1;
ECap1PassCount++;
ready1=1;
Ecap1ct4=ECap1Regs.CAP1;
Ecap1ct5=ECap1Regs.CAP2;
GpioDataRegs.GPACLEAR.bit.GPIO18 = 1;
ECap1Regs.ECCLR.bit.CEVT2 = 1;
ECap1Regs.ECCLR.bit.INT = 1;
ECap1Regs.ECCTL2.bit.REARM = 1;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP4;
}
__interrupt void thetaplus(void)
{
GpioDataRegs.GPDTOGGLE.bit.GPIO111 = 1; // GPIO34 = 1
theta=theta+0.03758;
if(theta>=6.28)
{
theta=0;
}
EPwm1Regs.ETCLR.bit.INT = 1;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3;
}
void ConfigureDAC(Uint16 dac_num)
{
EALLOW;
DAC_PTR[dac_num]->DACCTL.bit.DACREFSEL = REFERENCE;
DAC_PTR[dac_num]->DACOUTEN.bit.DACOUTEN = 1;
DAC_PTR[dac_num]->DACCTL.bit.LOADMODE=0;
DAC_PTR[dac_num]->DACVALS.all = 0;
DELAY_US(10); // Delay for buffered DAC to power up
EDIS;
}
void ConfigureGPIO(void)
{
EALLOW;
GpioCtrlRegs.GPAPUD.bit.GPIO18 = 0; // Enable pullup on GPIO34
GpioCtrlRegs.GPAMUX2.bit.GPIO18 = 0; // GPIO34 = GPIO34
GpioCtrlRegs.GPADIR.bit.GPIO18 = 1; // GPIO34 = output
GpioDataRegs.GPACLEAR.bit.GPIO18 = 1; // GPIO34 = 1
GpioCtrlRegs.GPAPUD.bit.GPIO19 = 0; // Enable pullup on GPIO34
GpioCtrlRegs.GPAMUX2.bit.GPIO19 = 0; // GPIO34 = GPIO34
GpioCtrlRegs.GPADIR.bit.GPIO19 = 1; // GPIO34 = output
GpioDataRegs.GPACLEAR.bit.GPIO19 = 1; // GPIO34 = 1
GpioCtrlRegs.GPBPUD.bit.GPIO32 = 0; // Enable pullup on GPIO34
GpioCtrlRegs.GPBMUX1.bit.GPIO32 = 0; // GPIO34 = GPIO34
GpioCtrlRegs.GPBDIR.bit.GPIO32 = 1; // GPIO34 = output
GpioDataRegs.GPBCLEAR.bit.GPIO32 = 1; // GPIO34 = 1
GpioCtrlRegs.GPCPUD.bit.GPIO67 = 0; // Enable pullup on GPIO34
GpioCtrlRegs.GPCMUX1.bit.GPIO67 = 0; // GPIO34 = GPIO34
GpioCtrlRegs.GPCDIR.bit.GPIO67 = 1; // GPIO34 = output
GpioDataRegs.GPCCLEAR.bit.GPIO67 = 1; // GPIO34 = 1
GpioCtrlRegs.GPDPUD.bit.GPIO111 = 0; // Enable pullup on GPIO34
GpioCtrlRegs.GPDMUX1.bit.GPIO111 = 0; // GPIO34 = GPIO34
GpioCtrlRegs.GPDDIR.bit.GPIO111 = 1; // GPIO34 = output
GpioDataRegs.GPDCLEAR.bit.GPIO111 = 1; // GPIO34 = 1
GpioCtrlRegs.GPAPUD.bit.GPIO2 = 0; // Enable pullup on GPIO6
GpioDataRegs.GPACLEAR.bit.GPIO2 = 1;
GpioCtrlRegs.GPAMUX1.bit.GPIO2 = 1; // GPIO6 = GPIO6
GpioCtrlRegs.GPADIR.bit.GPIO2 = 1; // GPIO6 = output
GpioCtrlRegs.GPAPUD.bit.GPIO3 = 0; // Enable pullup on GPIO6
GpioDataRegs.GPACLEAR.bit.GPIO3 = 1;
GpioCtrlRegs.GPAMUX1.bit.GPIO3 = 1 ; // GPIO6 = GPIO6
GpioCtrlRegs.GPADIR.bit.GPIO3 = 1; // GPIO6 = output
GpioCtrlRegs.GPAPUD.bit.GPIO4 = 0; // Enable pullup on GPIO6
GpioDataRegs.GPACLEAR.bit.GPIO4 = 1;
GpioCtrlRegs.GPAMUX1.bit.GPIO4 = 1; // GPIO6 = GPIO6
GpioCtrlRegs.GPADIR.bit.GPIO4 = 1; // GPIO6 = output
GpioCtrlRegs.GPAPUD.bit.GPIO5 = 0; // Enable pullup on GPIO6
GpioDataRegs.GPASET.bit.GPIO5 = 1;
GpioCtrlRegs.GPAMUX1.bit.GPIO5 = 1; // GPIO6 = GPIO6
GpioCtrlRegs.GPADIR.bit.GPIO5 = 1; // GPIO6 = output
GpioCtrlRegs.GPAPUD.bit.GPIO6 = 0; // Enable pullup on GPIO6
GpioDataRegs.GPACLEAR.bit.GPIO6 = 1;
GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 1; // GPIO6 = GPIO6
GpioCtrlRegs.GPADIR.bit.GPIO6 = 1; // GPIO6 = output
GpioCtrlRegs.GPAPUD.bit.GPIO7 = 0; // Enable pullup on GPIO6
GpioDataRegs.GPASET.bit.GPIO7 = 1;
GpioCtrlRegs.GPAMUX1.bit.GPIO7 = 1; // GPIO6 = GPIO6
GpioCtrlRegs.GPADIR.bit.GPIO7 = 1; // GPIO6 = output
EDIS;
}
void GPIOQua()
{
//5x2xTSYSCLKOUT
GpioCtrlRegs.GPACTRL.bit.QUALPRD3 = 2;//Qualification sampling period for GPIO24 to GPIO31,2:QUALPRDx = PLLSYSCLK/4
GpioCtrlRegs.GPAQSEL2.bit.GPIO24 = 1,0;//1,0 Qualification (6 samples)
GpioCtrlRegs.GPAQSEL2.bit.GPIO25 = 1,0;//1,0 Qualification (6 samples)
GpioCtrlRegs.GPAQSEL2.bit.GPIO26 = 1,0;//1,0 Qualification (6 samples)
}
void InitEPwm1Example()
{
EALLOW;
// Setup TBCLK
EPwm1Regs.TBPRD = 5000; // Set timer period 5000 TBCLKs (10kHz)
EPwm1Regs.TBPHS.bit.TBPHS = 0x0000; // Phase is 0
EPwm1Regs.TBCTR = 0x0000; // Clear counter
// Set Compare values
// EPwm1Regs.CMPA.bit.CMPA = 1000; // Set compare A value
// EPwm1Regs.CMPB.bit.CMPB = 1000+50; // Set Compare B value
// Setup counter mode
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up and down
EPwm1Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Disable phase loading
EPwm1Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; // Clock ratio to SYSCLKOUT
EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1;
// Setup shadowing
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // Load on Zero
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
//EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR;
//EPwm1Regs.AQCTLA.bit.CAD = AQ_SET;
//EPwm1Regs.AQCTLB.bit.CBU = AQ_SET;
//EPwm1Regs.AQCTLB.bit.CBD = AQ_CLEAR;
// Interrupt where we will change the Compare Values
EPwm1Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // Select INT on Zero event
EPwm1Regs.ETSEL.bit.INTEN = 1; // Enable INT/// Original 1
EPwm1Regs.ETPS.bit.INTPRD = ET_1ST; // Generate INT on 3rd event
EDIS;
}
void InitEPwm2Example()
{
EALLOW;
// Setup TBCLK
EPwm2Regs.TBPRD = 5000; // Set timer period 5000 TBCLKs (10kHz)
EPwm2Regs.TBPHS.bit.TBPHS = 0x0000; // Phase is 0
EPwm2Regs.TBCTR = 0x0000; // Clear counter
// Set Compare values
// EPwm2Regs.CMPA.bit.CMPA = 1000; // Set compare A value
// EPwm2Regs.CMPB.bit.CMPB = 1000+50; // Set Compare B value
// Setup counter mode
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up and down
EPwm2Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm2Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO;
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; // Clock ratio to SYSCLKOUT
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV1;
// Setup shadowing
EPwm2Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // Load on Zero
EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm2Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm2Regs.AQCTLA.bit.CAD = AQ_SET;
EPwm2Regs.AQCTLB.bit.CBU = AQ_SET;
EPwm2Regs.AQCTLB.bit.CBD = AQ_CLEAR;
// Interrupt where we will change the Compare Values
EPwm2Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // Select INT on Zero event
EPwm2Regs.ETSEL.bit.INTEN = 1; // Enable INT/// Original 1
EPwm2Regs.ETPS.bit.INTPRD = ET_3RD; // Generate INT on 3rd event
EDIS;
}
void InitEPwm3Example()
{
EALLOW;
// Setup TBCLK
EPwm3Regs.TBPRD = 5000; // Set timer period 2000 TBCLKs
EPwm3Regs.TBPHS.bit.TBPHS = 0x0000; // Phase is 0
EPwm3Regs.TBCTR = 0x0000; // Clear counter
// Set Compare values
//EPwm3Regs.CMPA.bit.CMPA = 2500; // Set compare A value
//EPwm3Regs.CMPB.bit.CMPB = 2500+50; // Set Compare B value
// Setup counter mode
EPwm3Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up and down
EPwm3Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Disable phase loading
EPwm3Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;
EPwm3Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; // Clock ratio to SYSCLKOUT
EPwm3Regs.TBCTL.bit.CLKDIV = TB_DIV1;
// Setup shadowing
EPwm3Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm3Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm3Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // Load on Zero
EPwm3Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm3Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm3Regs.AQCTLA.bit.CAD = AQ_SET;
EPwm3Regs.AQCTLB.bit.CBU = AQ_SET;
EPwm3Regs.AQCTLB.bit.CBD = AQ_CLEAR;
// Interrupt where we will change the Compare Values
EPwm3Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // Select INT on Zero event
EPwm3Regs.ETSEL.bit.INTEN = 1; // Enable INT/// Original 1
EPwm3Regs.ETPS.bit.INTPRD = ET_3RD; // Generate INT on 3rd event
EDIS;
}
void InitEPwm4Example()
{
EALLOW;
// Setup TBCLK
EPwm4Regs.TBPRD = 5000; // Set timer period 2000 TBCLKs
EPwm4Regs.TBPHS.bit.TBPHS = 0x0000; // Phase is 0
EPwm4Regs.TBCTR = 0x0000; // Clear counter
// Set Compare values
//EPwm4Regs.CMPA.bit.CMPA = 4000; // Set compare A value
//EPwm4Regs.CMPB.bit.CMPB = 4000+50; // Set Compare B value
// Setup counter mode
EPwm4Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up and down
EPwm4Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Disable phase loading
EPwm4Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN;
EPwm4Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; // Clock ratio to SYSCLKOUT
EPwm4Regs.TBCTL.bit.CLKDIV = TB_DIV1;
// Setup shadowing
EPwm4Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm4Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm4Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // Load on Zero
EPwm4Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm4Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm4Regs.AQCTLA.bit.CAD = AQ_SET;
EPwm4Regs.AQCTLB.bit.CBU = AQ_SET;
EPwm4Regs.AQCTLB.bit.CBD = AQ_CLEAR;
// Interrupt where we will change the Compare Values
EPwm4Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // Select INT on Zero event
EPwm4Regs.ETSEL.bit.INTEN = 1; // Enable INT/// Original 1
EPwm4Regs.ETPS.bit.INTPRD = ET_3RD; // Generate INT on 3rd event
EDIS;
}