Hi Sir/Madam,
We are using ISO1050DUBR isolated CAN Transceiver for one of my application,
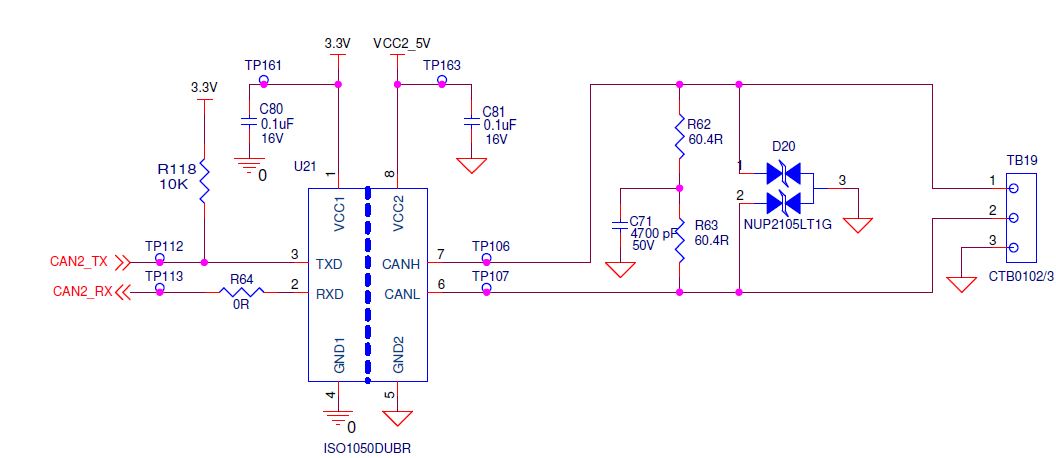
while in the schematic drafting we have a doubt about the requirement of pull up resistor in the TXD line of the transceiver chip to the microprocessor.
we are using BEAGLEBONE BLACK as a control board.
please confirm this query as soon as possible, so that we can finalize the schematic.
Image file of the schematic is attached.