Hi,
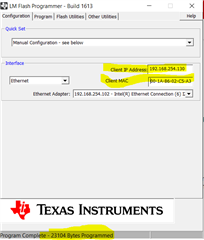
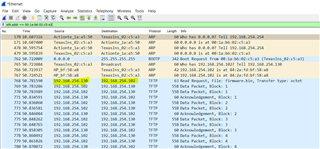
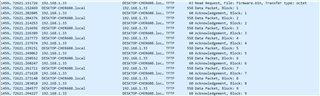
I have loaded Ethernet bootloader (boot_emac_flash) to MCU (TM4C1294NCPDTI), and I am able to load the program (boot_demo_emac_flash) using Ethernet Boot. In the default demo program, a dynamic IP (DHCP) should be obtained. However, I have modified the program so that a static IP should be assigned. But when I ping the device with the assigned Static IP, the request times out. What could be the problem?
The modification is as follows:
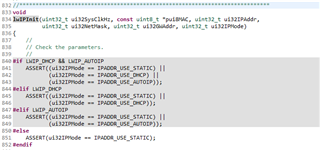
lwIPInit(g_ui32SysClockFreq, pui8MACAddr, (192u << 24) | (168u << 16) | (1u << 8) | (13u),
(255u << 24) | (255u << 16) | (255u << 8) | (0u),
(192u << 24) | (168u << 16) | (1u << 8) | (11u), IPADDR_USE_STATIC);
#define LWIP_AUTOIP 0
#define LWIP_DHCP 0
Thanks in advance.