


Hello All,
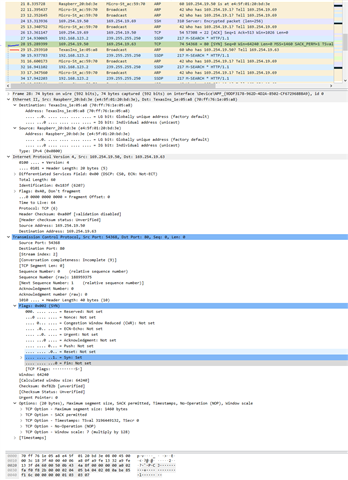
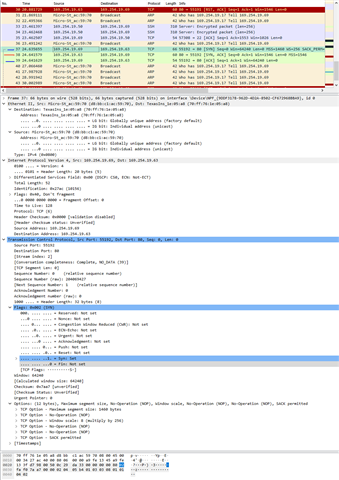
I am new to using the ethernet port on the EK-TM4C1294XL launch pad. I am trying to get a raspberry pi to connect to the TM4C chip. I am using the static IP address on the TM4C chip which is "169.254.19.63". For some reason I can send a "SYN" command to the TM4C chip using a TCP Debugger tool on my laptop and the TM4C chip returns a "SYN, ACK" packet and a connection is established.
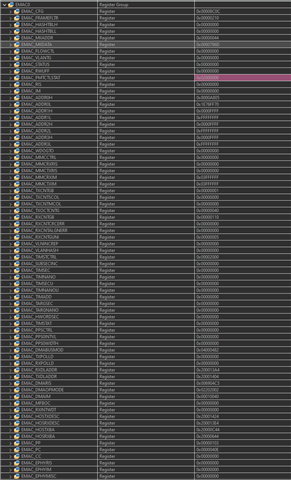
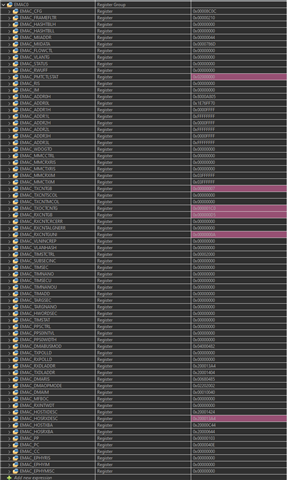
On the other hand, if I send a "SYN" command from the raspberry pi the TM4C chip does not send anything back or sends an ARP packet instead of a TCP packet. Interesting enough, the "g_pui8TxBuffer" shows that the "SYN, ACK" packet is being constructed correctly but the "MAP_EMACTxDMAPollDemand(EMAC0_BASE);" command simply does not send a TCP packet onto the bus. It is driving me crazy...
I have attached Wireshark captures and the EMAC0 registers right before the MAP_EMACTxDMAPollDemand(EMAC0_BASE); command is called. The code is the provided "enet_uip" example verbatim but with the static IP uncommented.
Any help is greatly appriciated


