Other Parts Discussed in Thread: TMP102
Hi
I tested ektm4c129 and tmp102evm.
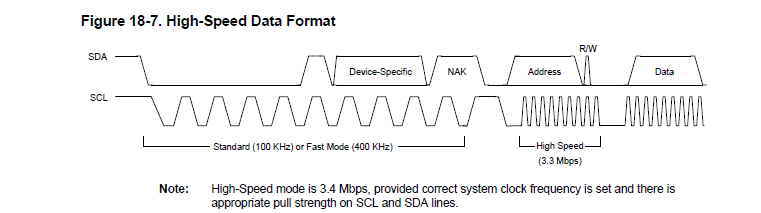
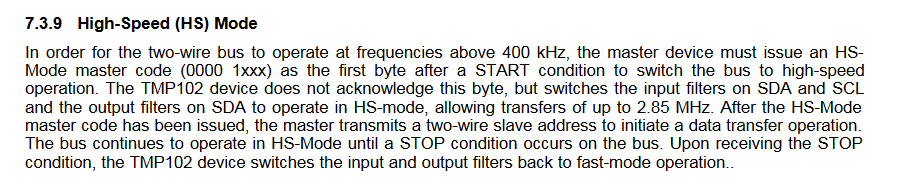
I am setting ektm4c129 with I2C High speed mode.
I can't set TM4C I2C any value except any value except table 18-3 value.
TM4C's I2C occured error.
I want 2Mhz of I2C transmissim value .
How can I setting value???

Tm4c High-speed mode can support 2.7Mhz (1285page)
TMP102's highspeed mode can support 2.85Mhz
I am setting TM4C's 2.77Mhz trasmission
but I read 0x00 tmp102's value with setting 2.77Mhz trasmission.
I think It meets tmp102's transmission specification.

what's problem??.
I attached my code.
Br
Yj.kim