hello
i'm trying to interface MAX6675 (k-Type - digital converter ) 'doesn't require mosi' and 'works in mode 1'
first i tried to use the tivaware examples that exists in (ti\TivaWare_C_Series-2.1.4.178\examples\peripherals\ssi)
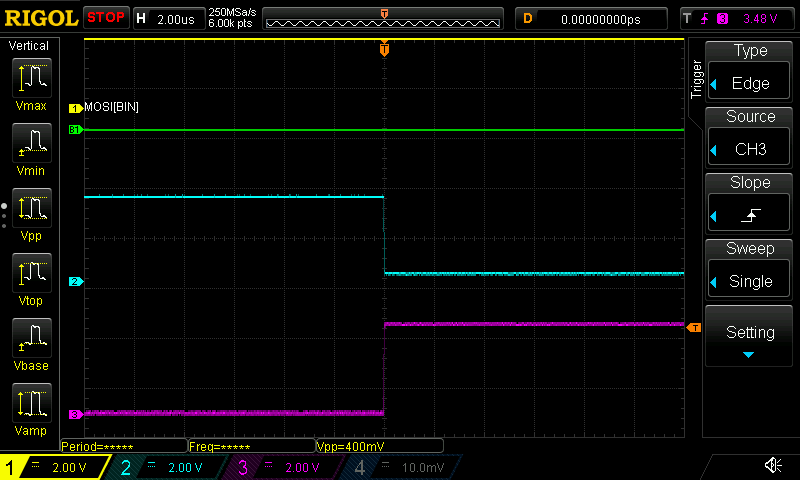
(spi_master.c) on the transmitting works very well but in the receiving it doesn't seem to work i tried to loop the tx part and on the oscilloscope everything works fine but when tried to loop the rx part the clock is not generated and the cs is always high
i thought of trying the (soft_spi_master.c) and everything is correct on the tx and rx so what is the problem with hardware one
note: i didn't modify the code at all just using a while(1) to watch the signals on the oscilloscope
thanks