I have recently bought a BOOSTXL-SENSHUB and had interest in using its MPU-9150 with my EK-TM4C123GXL. The example available in CCS that makes use of the MPU-9150 works as intended, but it's a non-rtos example. I am planning to use the MPU-9150 for a TI-RTOS application.
The closest example to what I've wanted has been found in a zip file, in the following link: http://processors.wiki.ti.com/index.php/TI-RTOS_MPU9150
I have noticed that there are some differences in that example with how, for example, TI-RTOS GPIO driver is used to configure pin PB2 as input and to issue interrupts at falling edges. I am aware some changes must be made in order to use convenient MPU9150 APIs found in MPU9150.h.
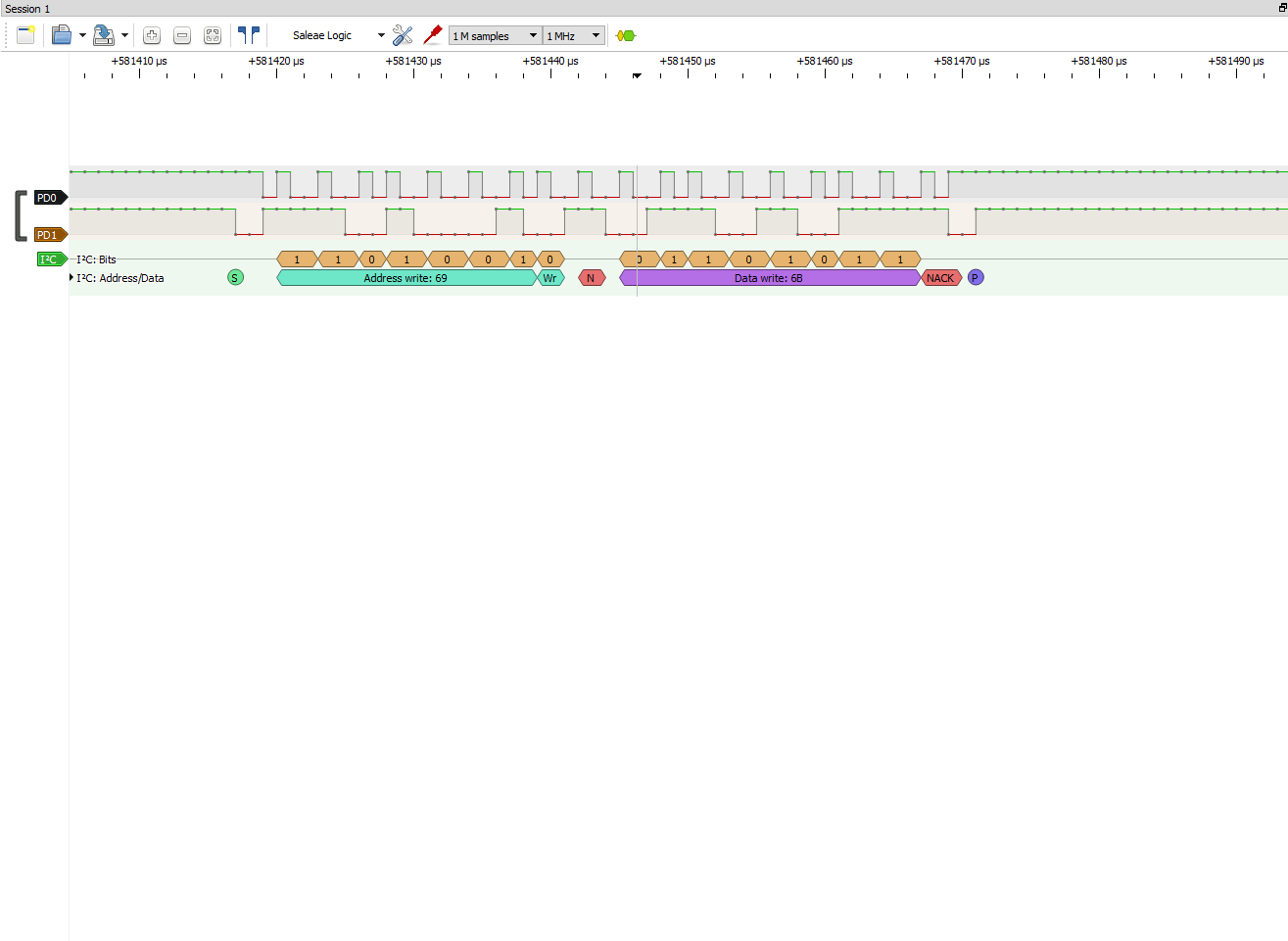
My current issue is that on my main, MPU9150_init() is returning false. I am not sure why, but I am thinking I need to do some changes to MPU9150.c, such as adding a transferMode, which seems absent from MPU9150.c found in the DK-TM4C123G TI-RTOS example. I have looked at the issue further and within MPU9150.c, the null is being returned due to I2C_transfer() returning false. I Will post parts of my code below, along with my project.
MPU9150_Handle MPU9150_init(unsigned int mpu9105Index,
unsigned int i2cIndex,
uint8_t i2cAddr)
{
I2C_Params i2cParams;
I2C_Transaction i2cTransaction;
Error_Block eb;
bool transferOK;
uint8_t writeBuffer[5];
uint8_t readBuffer[1];
MPU9150_Handle handle = &object[mpu9105Index];
/* Check if the handle was already opened */
if((mpu9105Index > MPU9150_COUNT) || (handle->i2c != NULL)) {
return (NULL);
}
/*
* Create GateMutex to guarantee that data received from the MPU9150
* retains its coherency.
*/
Error_init(&eb);
handle->dataAccess = GateMutex_create(NULL, &eb);
if (!handle->dataAccess) {
return (NULL);
}
/* Create I2C for usage */
I2C_Params_init(&i2cParams);
i2cParams.bitRate = I2C_400kHz;
handle->i2c = I2C_open(i2cIndex, &i2cParams);
handle->i2cAddr = i2cAddr;
/* If the I2C controller opened properly continue */
if (handle->i2c) {
/* Used by all I2C transfers */
i2cTransaction.slaveAddress = i2cAddr;
i2cTransaction.writeBuf = writeBuffer;
i2cTransaction.readBuf = readBuffer;
/* Put the MPU9150 into reset state */
writeBuffer[0] = MPU9150_O_PWR_MGMT_1;
writeBuffer[1] = MPU9150_PWR_MGMT_1_DEVICE_RESET;
i2cTransaction.writeCount = 2;
i2cTransaction.readCount = 0;
//ISSUE is found in this if statement
if (!I2C_transfer(handle->i2c, &i2cTransaction)) {
//added
System_printf("I2C_transfer() returned false \n Closing program\n");
System_flush();
return (NULL);
}
/*
* Check the value read back from status to determine if device
* is still in reset or if it is ready. Reset state for this
* register is 0x40, which has sleep bit set. Device may also
* respond with an address NACK during very early stages of the
* its internal reset. Keep polling until we verify device is
* ready.
*/
writeBuffer[0] = MPU9150_O_PWR_MGMT_1;
i2cTransaction.writeCount = 1;
i2cTransaction.readCount = 1;
do {
transferOK = I2C_transfer(handle->i2c, &i2cTransaction);
} while ((readBuffer[0] != MPU9150_PWR_MGMT_1_SLEEP) || (!transferOK));
/* Take the device out of reset and enable the clock */
writeBuffer[0] = MPU9150_O_PWR_MGMT_1;
writeBuffer[1] = MPU9150_PWR_MGMT_1_CLKSEL_XG;
i2cTransaction.writeCount = 2;
i2cTransaction.readCount = 0;
if (!I2C_transfer(handle->i2c, &i2cTransaction)) {
return (NULL);
}
/* Enable A I2C Master mode on the MPU9150 */
writeBuffer[0] = MPU9150_O_USER_CTRL;
writeBuffer[1] = MPU9150_USER_CTRL_I2C_MST_EN;
i2cTransaction.writeCount = 2;
i2cTransaction.readCount = 0;
if (!I2C_transfer(handle->i2c, &i2cTransaction)) {
//added
return (NULL);
}
/*
* Change to power mode complete, device is ready for configuration.
* Set MPU9150's sampling rate
* Set sample rate to 50 hertz. 1000 hz / (1 + 19)
*/
writeBuffer[0] = MPU9150_O_SMPLRT_DIV;
writeBuffer[1] = 19;
i2cTransaction.writeCount = 2;
i2cTransaction.readCount = 0;
if (!I2C_transfer(handle->i2c, &i2cTransaction)) {
return (NULL);
}
/*
* Write the I2C Master delay control so we only sample the AK
* every 5th time that we sample accel/gyro. Delay Count itself
* handled in next state.
*/
writeBuffer[0] = MPU9150_O_I2C_MST_DELAY_CTRL;
writeBuffer[1] = (MPU9150_I2C_MST_DELAY_CTRL_I2C_SLV0_DLY_EN |
MPU9150_I2C_MST_DELAY_CTRL_I2C_SLV4_DLY_EN);
i2cTransaction.writeCount = 2;
i2cTransaction.readCount = 0;
if (!I2C_transfer(handle->i2c, &i2cTransaction)) {
return (NULL);
}
/*
* Write the configuration for I2C master control clock 400khz
* and wait for external sensor before asserting data ready
*/
writeBuffer[0] = MPU9150_O_I2C_MST_CTRL;
writeBuffer[1] = (MPU9150_I2C_MST_CTRL_I2C_MST_CLK_400 |
MPU9150_I2C_MST_CTRL_WAIT_FOR_ES);
/*
* Configure I2C Slave 0 for read of AK8975 (I2C Address 0x0C)
* Start at AK8975 register status 1 (0x02)
*/
writeBuffer[2] = MPU9150_I2C_SLV0_ADDR_RW | 0x0C;
writeBuffer[3] = 0x02;
writeBuffer[4] = MPU9150_I2C_SLV0_CTRL_EN | 0x08;
i2cTransaction.writeCount = 5;
i2cTransaction.readCount = 0;
if (!I2C_transfer(handle->i2c, &i2cTransaction)) {
return (NULL);
}
/*
* Write the configuration for I2C Slave 4 transaction to AK8975
* 0x0c is the AK8975 address on i2c bus.
* we want to write the control register with the value for a
* starting a single measurement.
*/
writeBuffer[0] = MPU9150_O_I2C_SLV4_ADDR;
writeBuffer[1] = 0x0C;
writeBuffer[2] = 0x0A; //AK8975_O_CNTL
writeBuffer[3] = 0x01; //AK8975_CNTL_MODE_SINGLE
writeBuffer[4] = MPU9150_I2C_SLV4_CTRL_EN | 0x04;
i2cTransaction.writeCount = 5;
i2cTransaction.readCount = 0;
if (!I2C_transfer(handle->i2c, &i2cTransaction)) {
return (NULL);
}
/*
* Write application specific sensor configuration such as filter
* settings and sensor range settings.
*/
writeBuffer[0] = MPU9150_O_CONFIG;
writeBuffer[1] = MPU9150_CONFIG_DLPF_CFG_94_98;
writeBuffer[2] = MPU9150_GYRO_CONFIG_FS_SEL_250;
writeBuffer[3] = (MPU9150_ACCEL_CONFIG_ACCEL_HPF_5HZ |
MPU9150_ACCEL_CONFIG_AFS_SEL_2G);
i2cTransaction.writeCount = 4;
i2cTransaction.readCount = 0;
if (!I2C_transfer(handle->i2c, &i2cTransaction)) {
return (NULL);
}
/*
* Configure the data ready interrupt pin output of the MPU9150.
*/
writeBuffer[0] = MPU9150_O_INT_PIN_CFG;
writeBuffer[1] = MPU9150_INT_PIN_CFG_INT_LEVEL |
MPU9150_INT_PIN_CFG_INT_RD_CLEAR |
MPU9150_INT_PIN_CFG_LATCH_INT_EN;;
writeBuffer[2] = MPU9150_INT_ENABLE_DATA_RDY_EN;
i2cTransaction.writeCount = 3;
i2cTransaction.readCount = 0;
if (!I2C_transfer(handle->i2c, &i2cTransaction)) {
return (NULL);
}
return (handle);
}
else {
return (NULL);
}
}