Other Parts Discussed in Thread: HALCOGEN
Hi all,
i am working on TMS470MF06607 and i have a OBD-II emulator. I have a 2 boards of TMS470 and both are working fine to each other with a CAN communication.
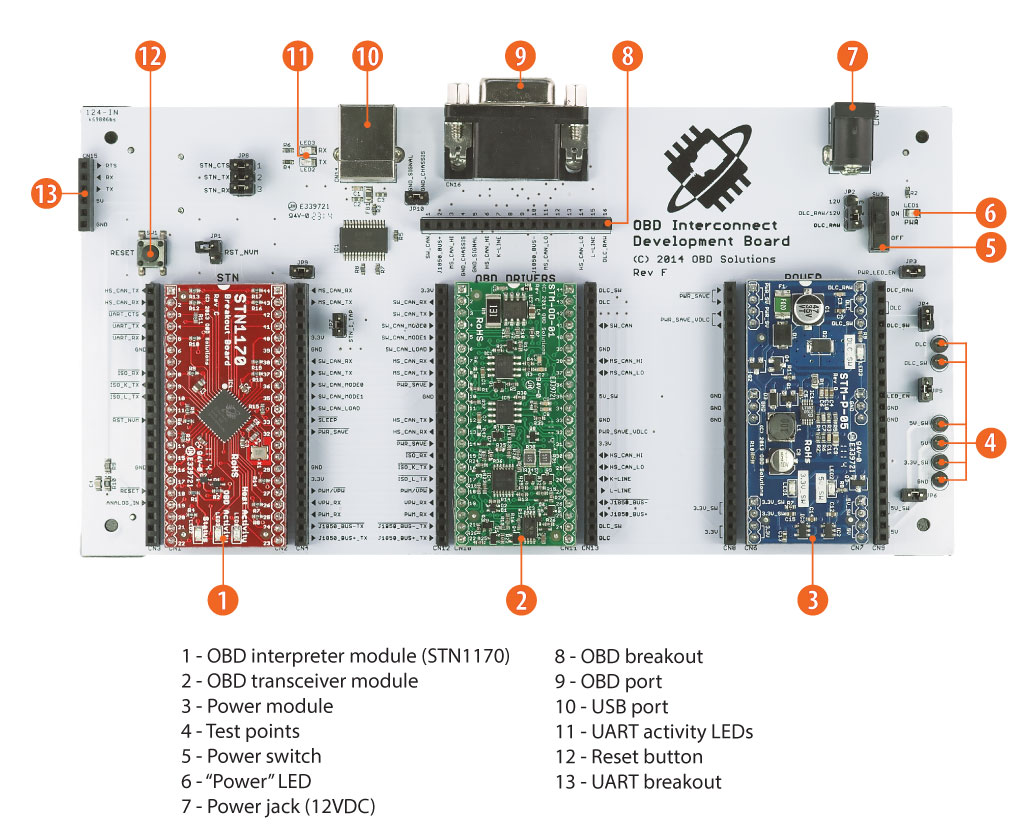
but i would like to test with OBD-II emulator, because its a standard tool i have to check real communication of CAN.
but i don't know TMS470 is using High Speed CAN or Low Speed CAN, or K & L CAN or Medium speed CAN.
so, can anybody help me in this. how TMS is working and how can get a data from OBD-II board.
Thanks,
Anil D.