Other Parts Discussed in Thread: DRV8353, DRV8353RS-EVM, MOTORWARE
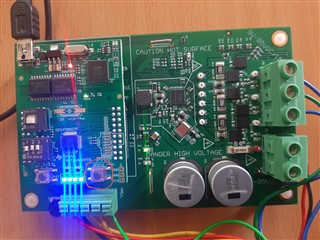
We are using ISO-F28027F MCU Board interfaced with DRV8353RS-EVM Board to run the 48V BLDC Motor. We used lab05b code of DRV8353 EVM firmware file for this in CCS software and followed all the steps provided in this manual ( DRV8353Rx-EVM InstaSPIN Software Quick Start Guide (Rev. B) (ti.com) ). The motor spins fine through the GUI application. But, We would like to run the motor without using GUI and any external platform to control the motor operation, i.e, To run the motor directly by flashing a full program in the controller and operate the start and stop function with a switch. Is there any sample code or source available for this?
Software Quick Start Guide (Rev. B) (ti.com) ). The motor spins fine through the GUI application. But, We would like to run the motor without using GUI and any external platform to control the motor operation, i.e, To run the motor directly by flashing a full program in the controller and operate the start and stop function with a switch. Is there any sample code or source available for this?
Thanks and Regards,
JESINTHA