We have two below questions;
- While capturing PWM of one controller with ECAP module on another controller with same clock (100 MHZ), we are getting around 100 HZ difference in actual value of PWM frequency and captured one with ECAP.
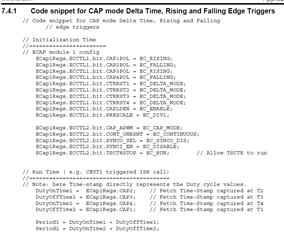
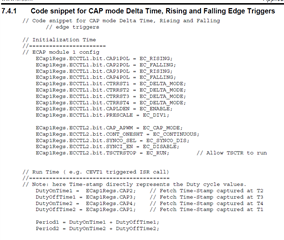
We are using ECAP in delta with triggers on rising and falling edge to capture PWM Frequency and Duty Cycle.
Can you please help us to know the reason, why we are getting frequency value with 100Hz difference on ECAP?
- We want to capture the time difference between PWM generation on one controller and the ECAP ISR on another controller. Do you suggest any quick solution to measure time difference between the events on two different controllers except using GPIO pins?