Dear Champs,
I am asking this for our customer.
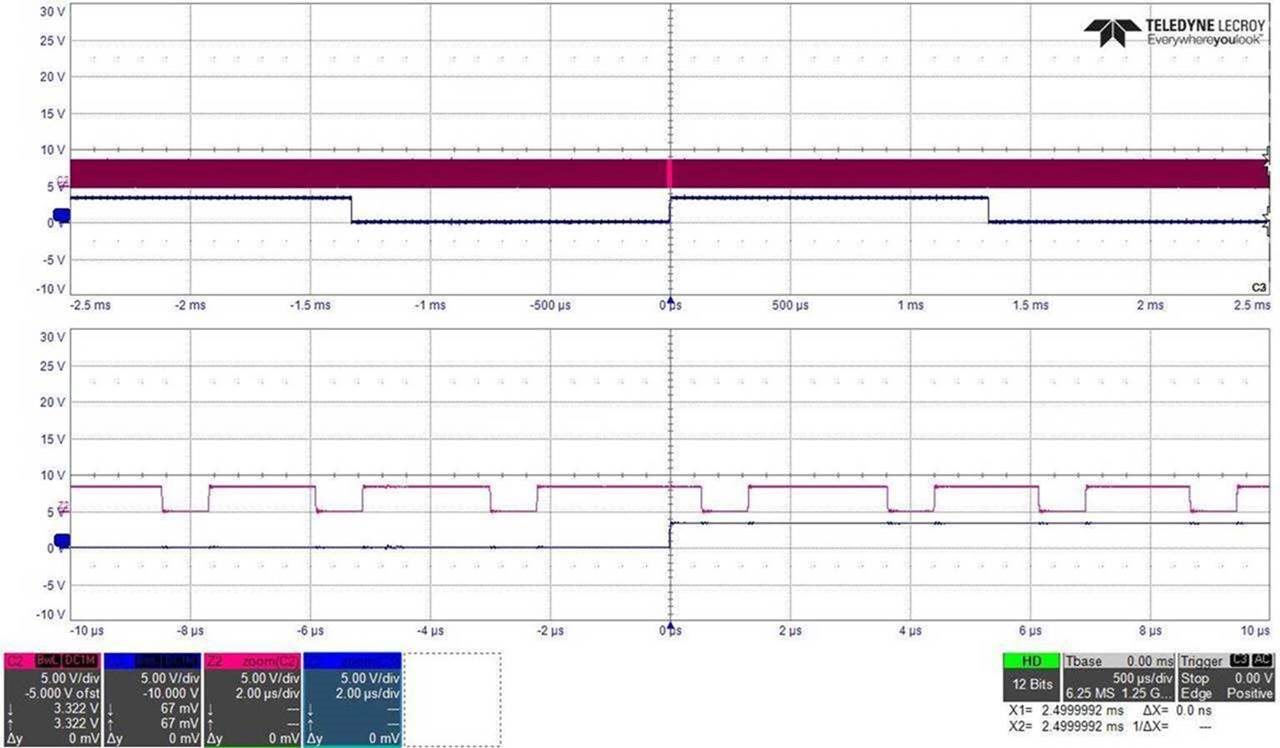
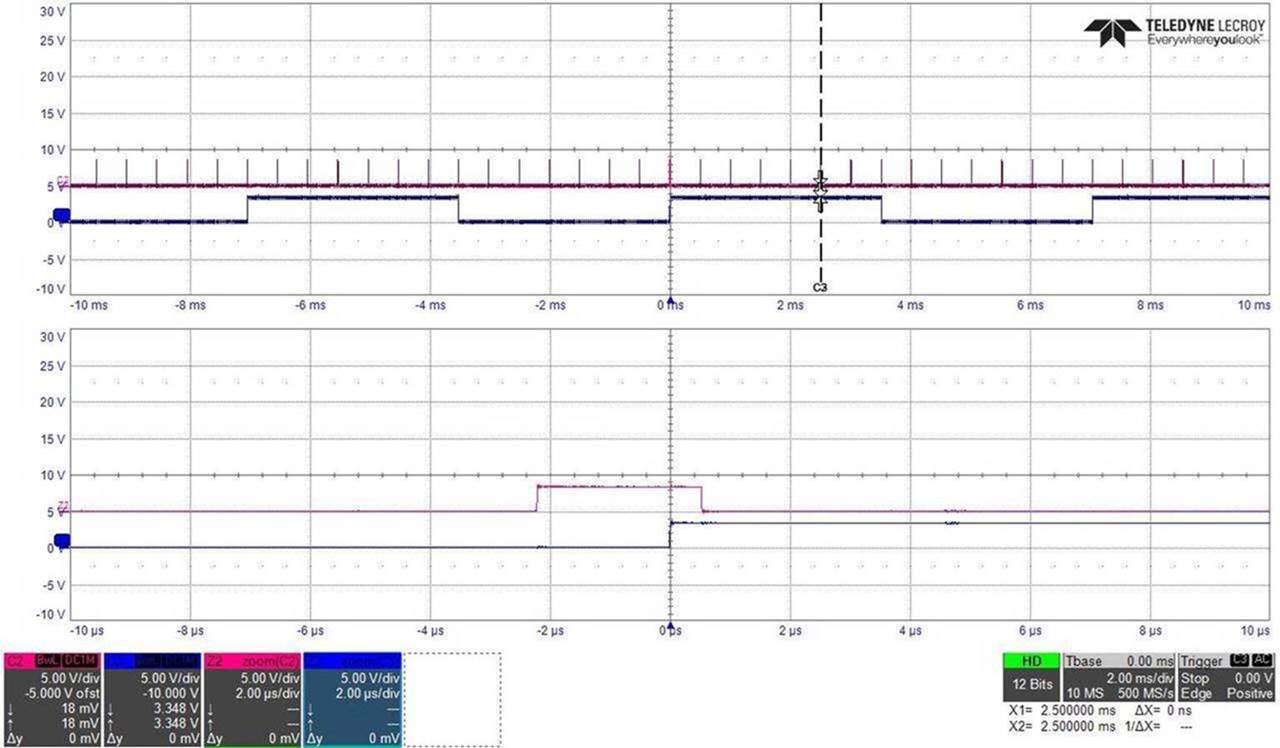
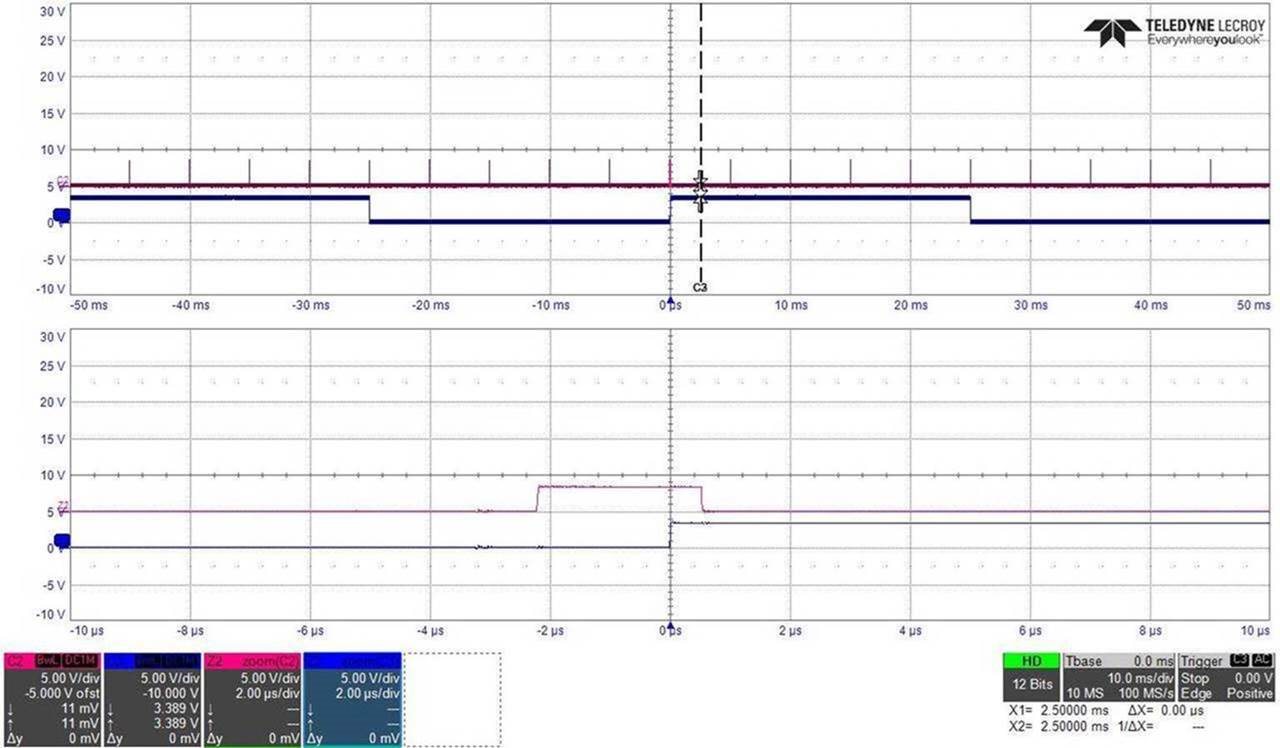
The user is studying using HRPWM especially HR period and found SFO library takes up to 1.3 ms (13000 cycle) based on Table 18-19 of the TRM 18.15.2 Appendix A.
If SFO is put in the background loop in main(), it will affect all other operations in the main loop.
1. SFO library is usually placed in the background loop of main and can be interrupted by any other ISR. That is, SFO can be run in a very slow way. Is it right?
2. The user cannot accept using 1.3 ms in the background loop because there are other things to do in the same background. Do you have any suggestion how do they solve this issue?
3. The user is asking if TI can share with the source codes and algorithm so that they can divide SFO into several parts in the background loop of main() to ensure other things in the same background can be run as desired. Is it feasible?
4. Is SFO library required for them to use HRPWM?
5. If they don't use SFO (by disabling auto-conversion) and use max 310 ps to calculate MEP based on MAX of Table 5-62 of the datasheet, what will happen to PWM output when step size becomes smaller because temperature/voltage change (MEP is not changed)?
6. If they don't use SFO (by disabling auto-conversion) and use min 150 ps to calculate MEP based on TYP of Table 5-62 of the datasheet, what will happen to PWM output when step size becomes larger because temperature/voltage change (MEP is not changed)?
Please help us clarify.
Wayne Huang