


Other Parts Discussed in Thread: CONTROLSUITE
Hi team,
Here's an issue from the customer may need your help:
1) The CLA calculation period is 12.5us and the CLA initialization and the sin, cos signal inputs are good. The decode result is correct after resolver_algo_CLA( ) calculation. Why does the sin, cos signal go through the FIR filter (sinFIRout,FIRout) and always 0?
2) The CLA calculation period is 12.5us, the angle is correct and stable after the resolver_go_CLA( ) calculation, when the CLA calculation period is changed to 6.25us, the result is incorrect and the angle is always changing. What's the possible reason for that and how to fix it?
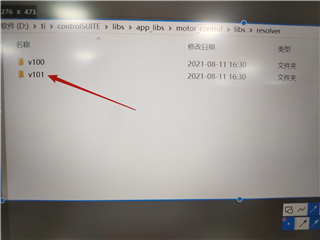
The library that calls controlSUITE is shown in the following figure:
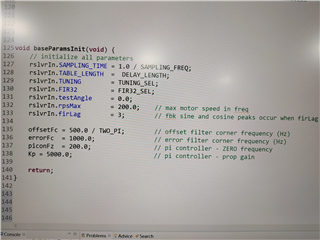
The initialization functions and parameters are as follows:
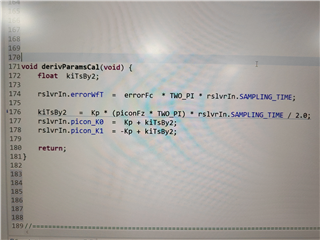
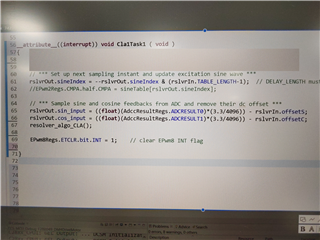
CLA task:
Could you help check this case? Thanks.
Best Regards,
Cherry
