Other Parts Discussed in Thread: LAUNCHXL-F28027F, MOTORWARE
Hello,
I’m using the BOOSTXL-DRV8213RH in combination with the LAUNCHXL-f28027F as well as the “motorware_1_01_00_18” software package especially the proj_LAB11a (InstaSPIN Projects and Labs User’s Guide) – everything is ok so far.
For test purpose I would like to drive a continuous current of 15A throw one phase and 7.5A throw other two phases. So my idea was using the Rs recalibration procedure therefore because that one (as far as I understood) will force the USER_MOTOR_RES_EST_CURRENT throw the phases as requested.
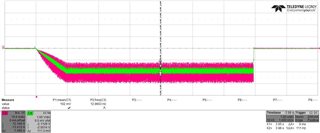
Instead of a motor, I use three R-L components connected in a star topology (as a motor) (R=0.47Ohm, L=6.4mH). I adjusted the estimation current (USER_MOTOR_RES_EST_CURRENT) to 15A in LAB11a, I did not change motor parameter in the user.h file. Then, I started an offset compensation followed by an Rs recalculation (RsRecalc) while monitoring the phase current.
Two questions that arise to me;
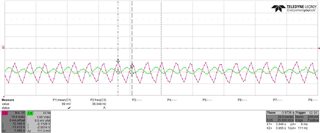
- Why does an average current of 20 A occur?
- Why does the current oscillate at a frequency of about 100 Hz?
i there an other way (more simple) to force iL?
Best regards
Thomas