This FAQ is designed to give a high-level overview of how C2000 real-time MCUs fit in Automotive LiDAR systems.
- What is Automotive LiDAR?
- Application for Advanced Driver Assistance Systems (ADAS) and/or high-level autonomous driving, used to create 3D model of the scene around the vehicle
- See TI's system block diagram here: https://www.ti.com/solution/automotive-mechanically-scanning-lidar
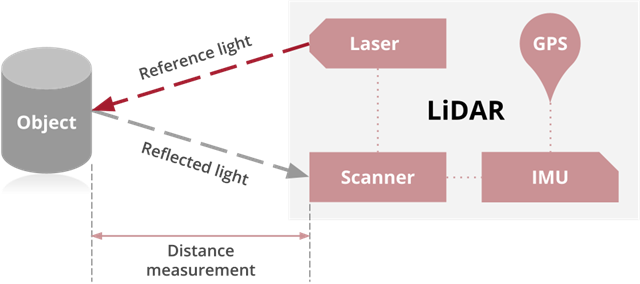
- Functional diagram:
-
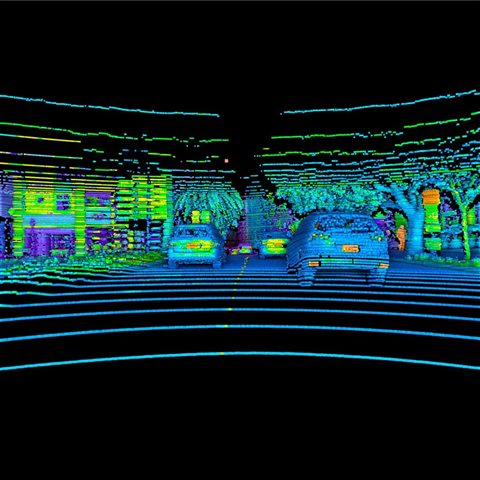
- Heat map (image created from LiDAR data):
- Application for Advanced Driver Assistance Systems (ADAS) and/or high-level autonomous driving, used to create 3D model of the scene around the vehicle
- Where does C2000
 MCU fit in LiDAR application?
MCU fit in LiDAR application?
- Sensing: reads position sensor signal, decodes position sensor signal / converts to digital signal, sends to main controller
- Sensing + multi-axle motor control: same functions as above + driving multiple motors (usually 2, BLDC or stepper) and also handles synchronization
- Recommended C2000 MCU: F28003x
- Recommended C2000
- Sensing + multi-axle motor control + laser beam control: same functions as above + on/off control of laser beam through HRPWM
- What are the key care-abouts within a LiDAR system, and how does the C2000 real-time MCU portfolio address them?
- Efficient motor control and laser beam control
- Synchronizing speeds between slower speed motor and higher speed motor enabled by real-time control capabilities
- HRPWM handles high-resolution timing for beam control
- Scalability / flexibility
- Handle several different types of functions: from sensing only, up to sensing + multi-motor control + laser beam control
- Accepting various types of sensors including hall sensors, magnetic sensors, and others
- Scalable portfolio covering wide range of LiDAR use-cases: Low-end requirements (QM safety) up to ASIL D on roadmap
- Communication with FPGA
- Supports various communication peripherals to support varying customer requirements: FSI (Fast Serial Interface), EMIF, Ethernet, more
- Supports various communication peripherals to support varying customer requirements: FSI (Fast Serial Interface), EMIF, Ethernet, more
- Efficient motor control and laser beam control