


Other Parts Discussed in Thread: TIDM-1007
Hi Team,
In TIDM-2008/TIDM-1007, Lab2.
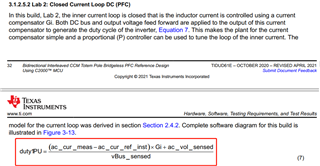
1. Why the input of Current Loop is ac_cur_meas - ac_cur_ref_inst? This is the opposite of actual Compensator error calculation method.
2. The output of duty1PU is Current Loop plus voltage feed forward. Voltage feed forward = ac_vol_sensed / vBus_sensed. Why the output of Current Loop need to divide by vBus_sensed?
Thanks & Regards
Yale Li


