Hello Guys,
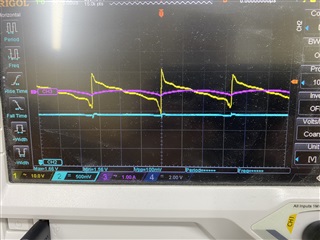
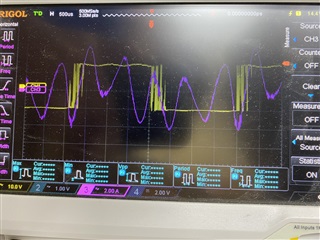
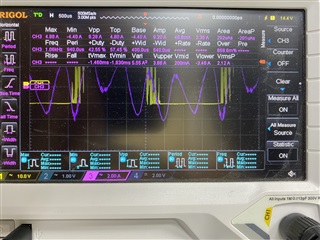
We currently use LAB-5A with ebike BLDC hub motor 24V; 20 Poles ; 250 - Rated power. We are facing high current ripples shown on the attached pictures.
Additionally I attached the user.h file. Is It normal behavior beside the fact of surface mount magnets ? May I tune something more to reduce the ripples ?
Waiting for you to reply,
Sincerely,
Georgi Gospodinov