Hi to everybody,
this my first post in this forum.
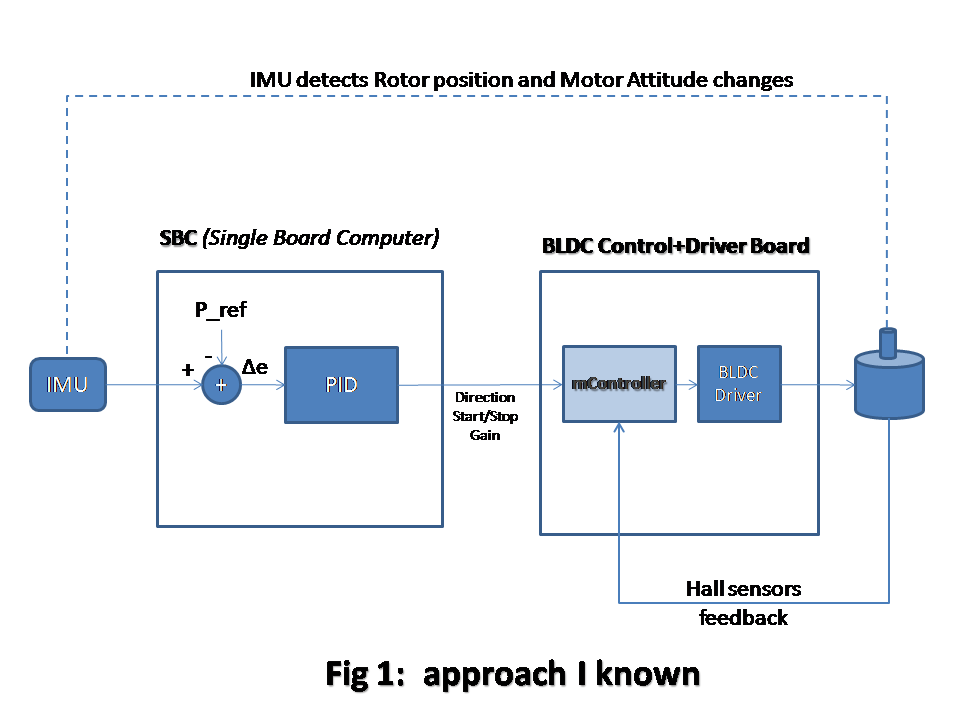
I'm evaluating various BLDC mControllers to drive three BLDC motors for antenna tracking. The tracking constraints are very strong with high precision and stability around the antenna position (conical scan with half-aperture@0.3deg with a revolution period <= 1s). Therefore the BLDC have to mainly work closest to a zero position alternating CW and CCW corrections depending the external dinamic conditions ( to mantain the conical scan as a circle).
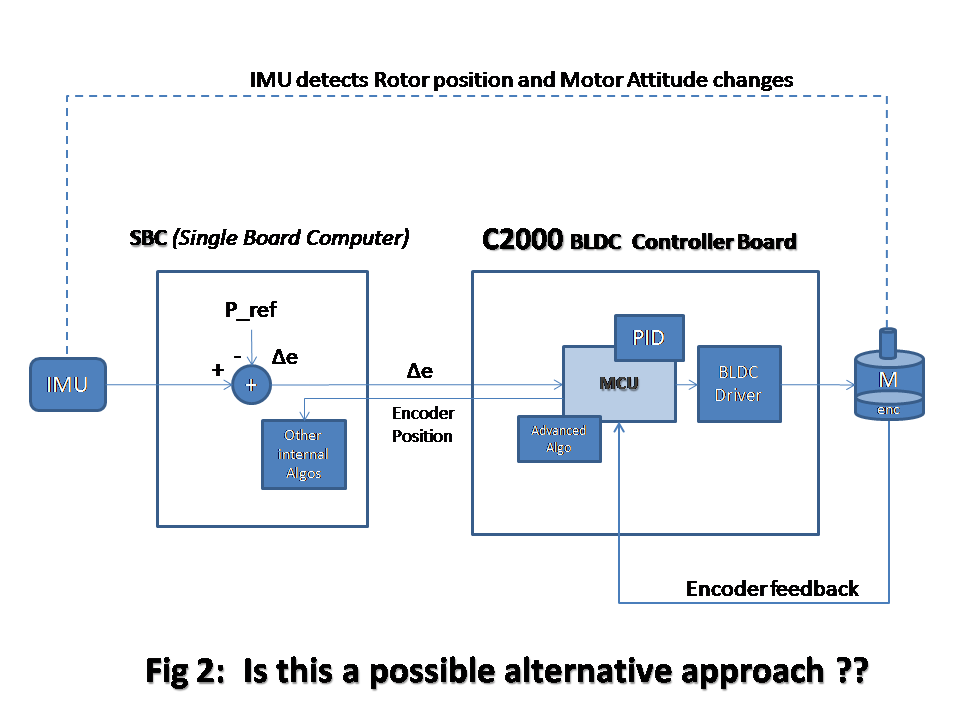
In you opinion is the C2000 controller suitable for an application of this kind or maybe it is better choose another TI mCtrl ??
Thank you in advance for you availability,
Andy