Other Parts Discussed in Thread: CONTROLSUITE
Tool/software: Code Composer Studio
Hello,
I am trying to compile a simple blinky application using GNU ARM linero compiler and run it on Concerto arm cortex m3 core. I use a F28M35H52C based Concerto evaluation board (Follow below link)
http://www.ti.com/tool/tmdsdockh52c1
But on the CCS studio if i select GNU linero compiler to build my application it pops up a warning saying the CCS will not automatically create any linker script or startup code which basically are critical initialization files to even to get a simple blinky application running.
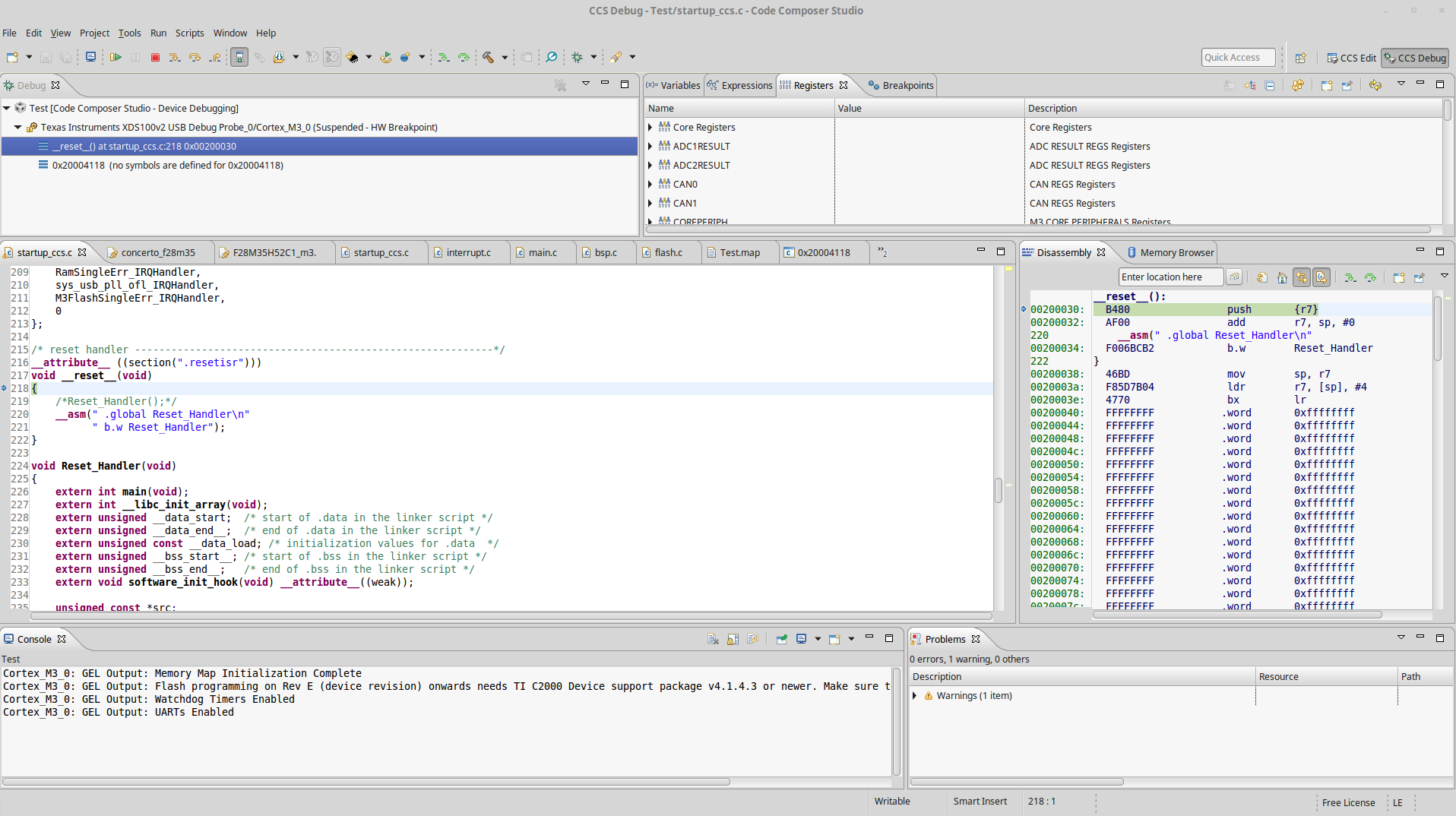
So i have now created my own linker script and a start up code for cortex m3 core similar to a article i read from a author on embedded.com website.
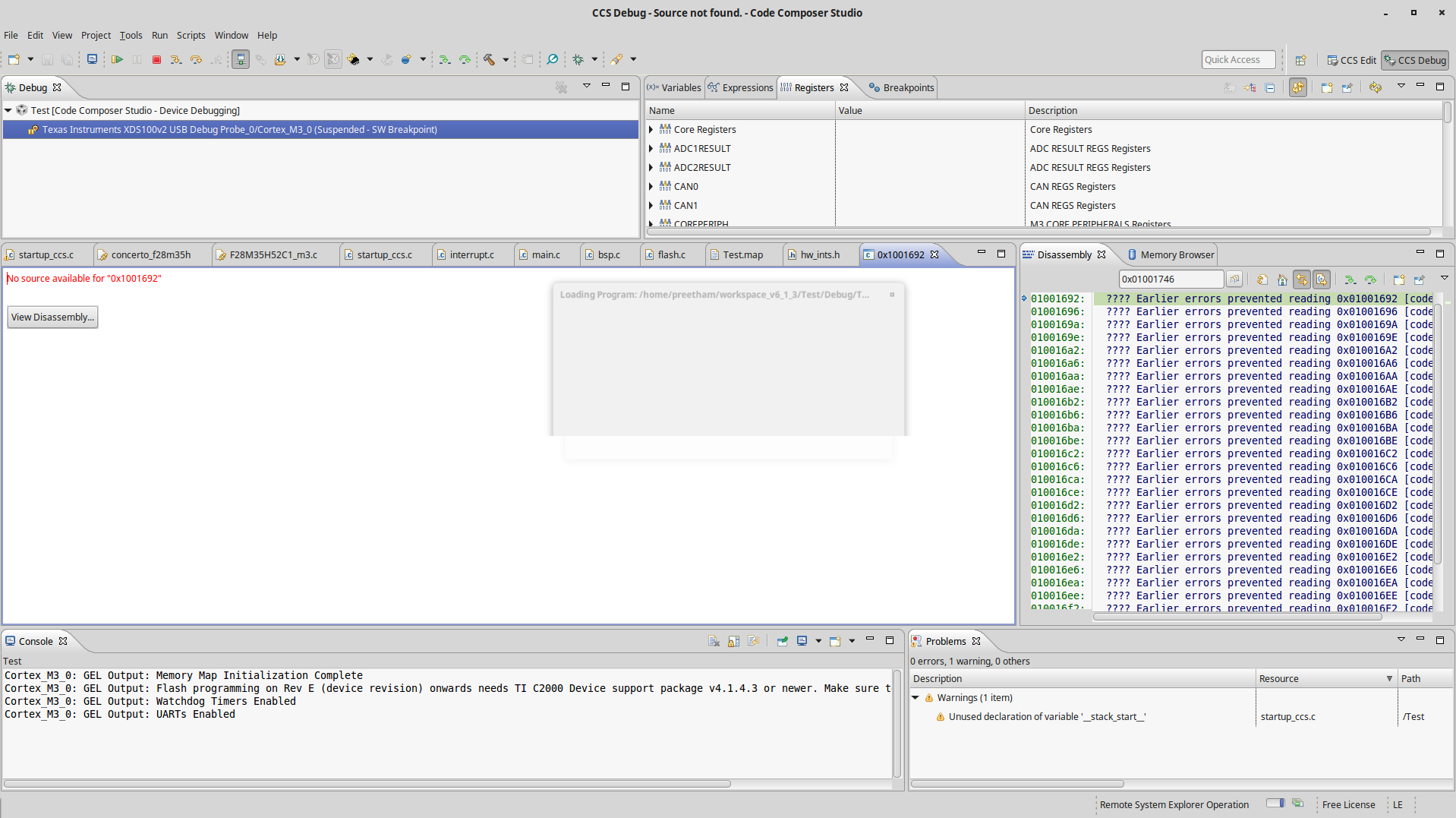
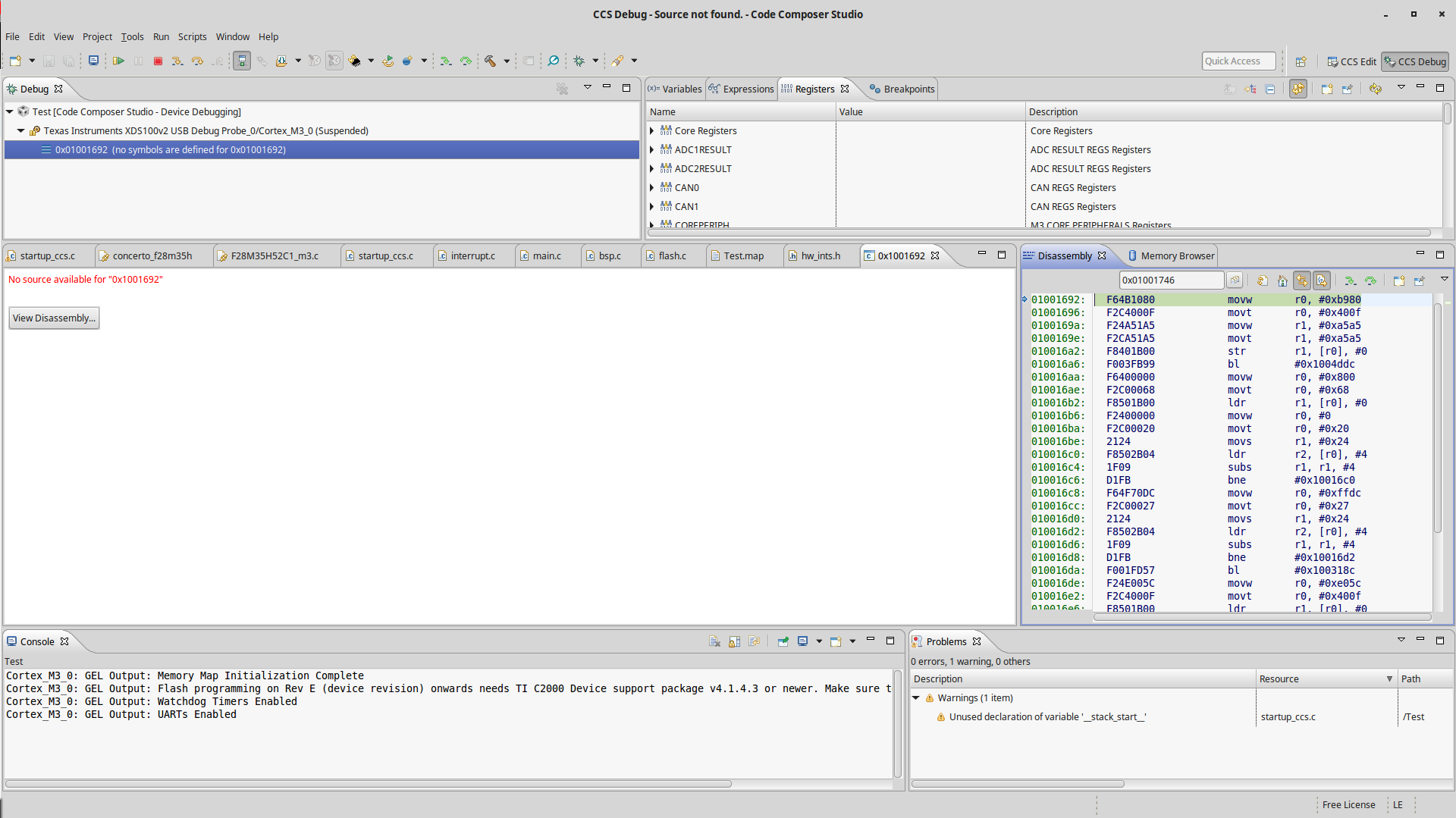
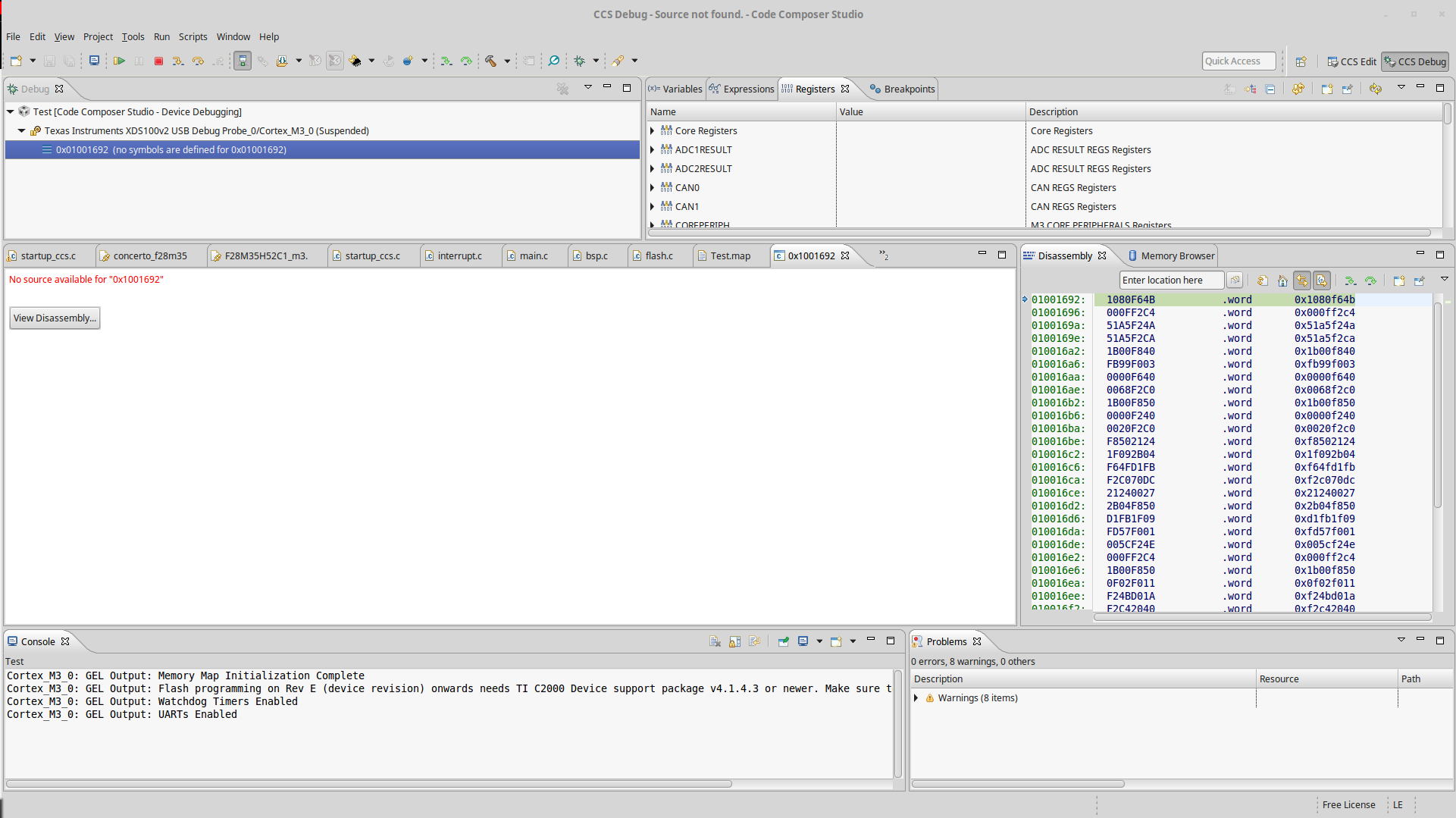
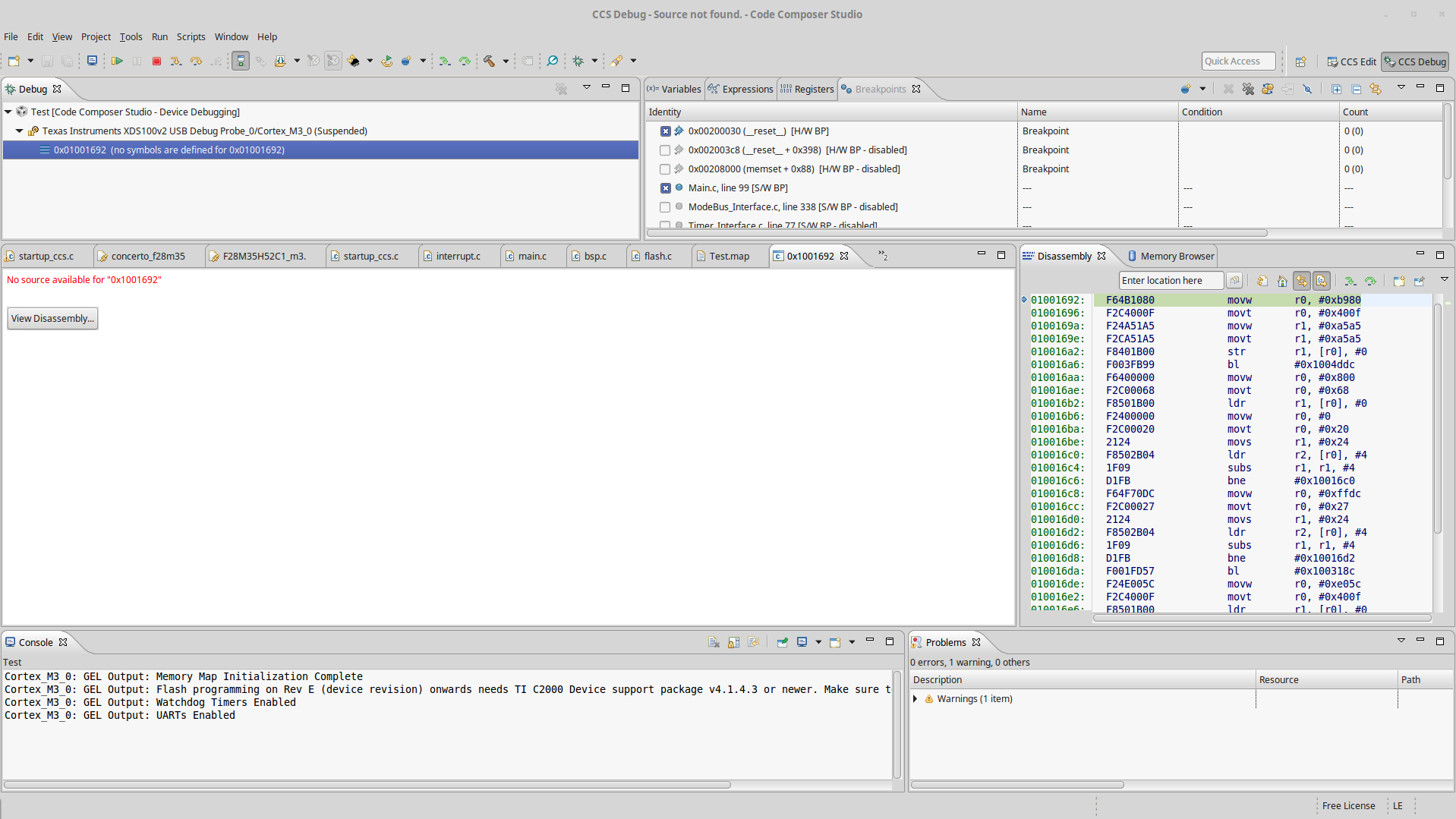
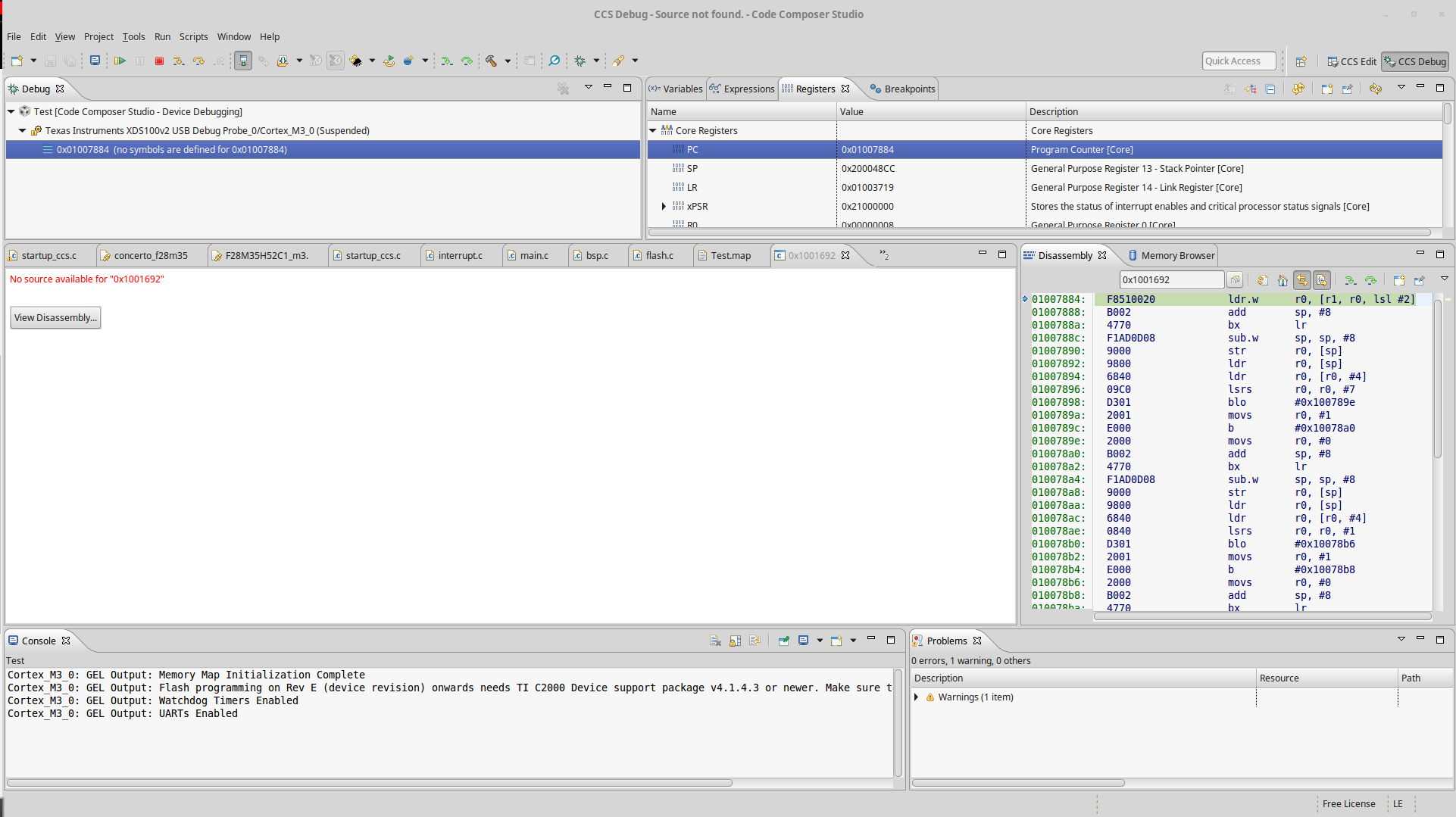
Now i am able to compile and link the project. But during debugging when i enter in to main and try to initialize the peripheral registers to trigger the on board LED, it could step over the RCGC2 register and when i try to step over the GPIODIR register the code breaks goes in to some undefined state (I think it resets). I think my linker script or startup function are correct.
Really appreciate if someone could help me with this regards. I have attached my entire project which has the linker script and the startup code.
The files are very generic and the linker script is named as "concerto_f28m35h2c.lds" and the startup file is named as "startup_ccs.c".