Other Parts Discussed in Thread: TIDA-00916, MOTORWARE
Tool/software: Code Composer Studio
Hi,
I am confused about the filter frequency setting in the voltage sense circuit.
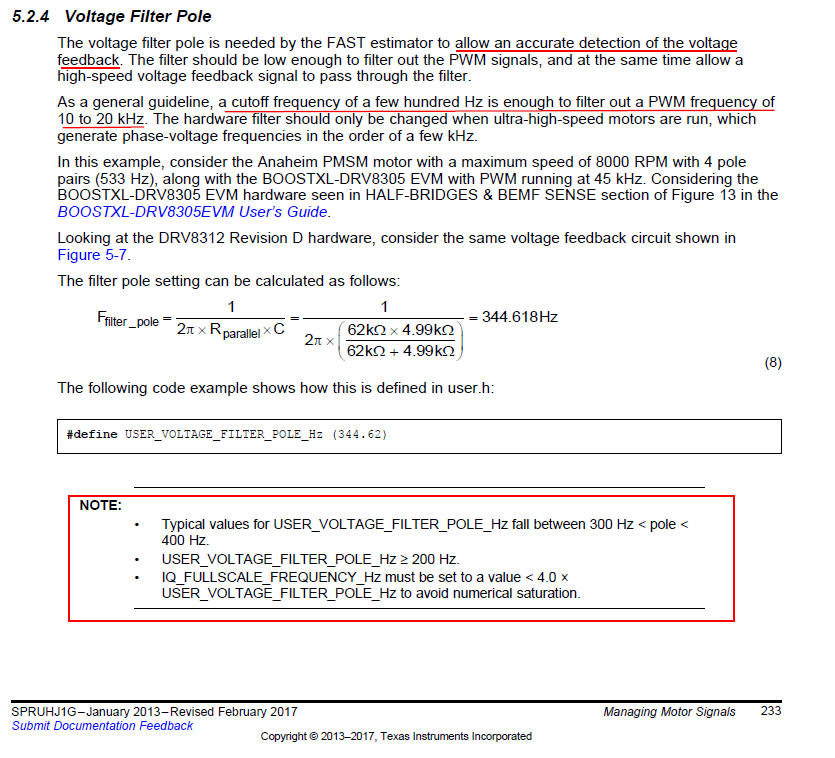
The InstaSpin-foc relates that the typical values for USER_VOLTAGE_FILTER_POLE_HZ fall between 300Hz < pole<400Hz and the maxim electrical frequency in this example is 533 Hz. You may refer to the figure below.
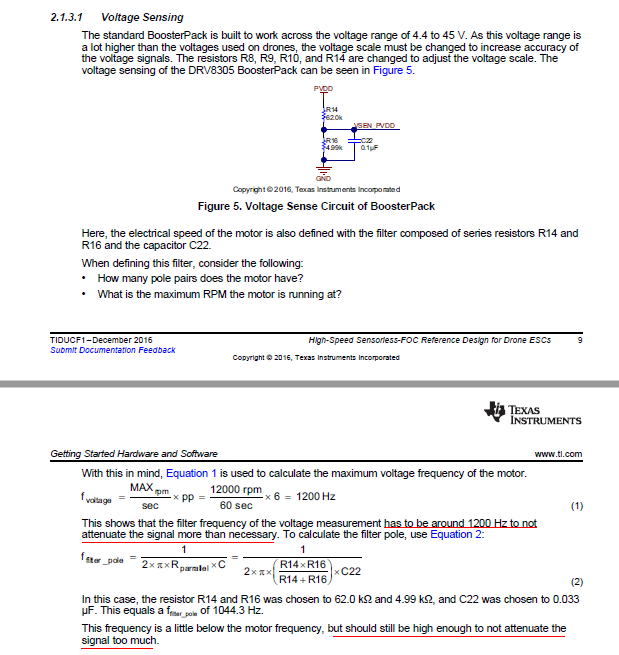
And in the datasheet of TIDA-00916,it relate that the frequency should be a little below the motor frequency but should still be high enough to not attenuate the signal too much(Page 10).
I am really confused by the two explains and I think there are contradictory. And My view is that the second explain and its corresponding setting method may be more reasonable.So,if the maxim frequency of my system is 1500 Hz, the filter frequency should be set around 1500 Hz. And further more, I want to know how the filter frequency will influence my system if the frequency be set too low.
Thanks.