


Hello,
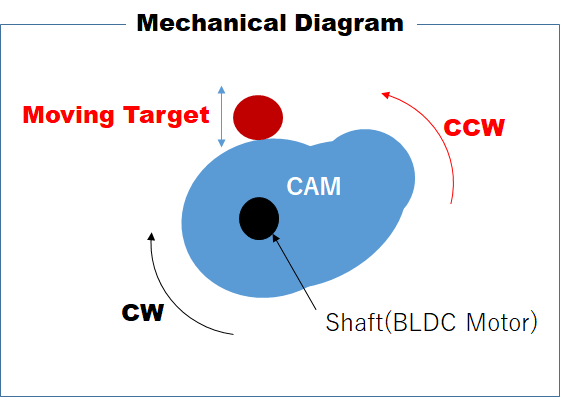
We are trying to acquire InstaSPIN-Motion parameters with the camshaft mechanism as shown below.
-The parameters of FOC have already been acquired for the original motor without the cam mechanism.
-So far, it was only CW rotation.
We changed various values when acquiring parameters with lab05c. But we could not be rotated 360 degrees during the InstaSPIN-Motion parameter acquisition at this mechanism.
We had to choose the place where the most mechanical force is applied, as it could only be rotated in a very short time during lab05c identification.
Q1: Please let me know how to make one turn and acquire the parameter at lab05c with this mechanism.
This time, not only this CW operation but also CCW operation will be performed.
The Motion parameters are considered to be different during CW operation and CCW operation on our mechanism.
Q2: Please tell me how to get motion parameters in not only CW but also CCW.
We are considering the following scenario.
1. Get motion parameters on CW rotation.
During CW operation at lab05c, set #define USER_MOTOR_MAX_SPEED_KRPM (6.0) to obtain Motion parameters,
After that,
2. Get InstaSPIN-Motion parameters on CCW rotation.
During CCW operation at lab05c, after changing #define USER_MOTOR_MAX_SPEED_KRPM to (-6.0), we get CCW Motion parameters.
Best regards,
ay0689
