Hello,
I am supposed to implement I2C communication between TMS320F28379D and a type of FPGA, and I am using F28379D LaunchPad.
At first, I have tested the development kit with a Demo and it worked, so there should be no issue with the hardware or CCS
Second step, I'd like to check if the example i2c_eeprom works with the LaunchPad or not. I have pulled up I2CA pins (GPIO32 and GPIO33) to 3.3V on the board with 4.7K Ohm resistors.
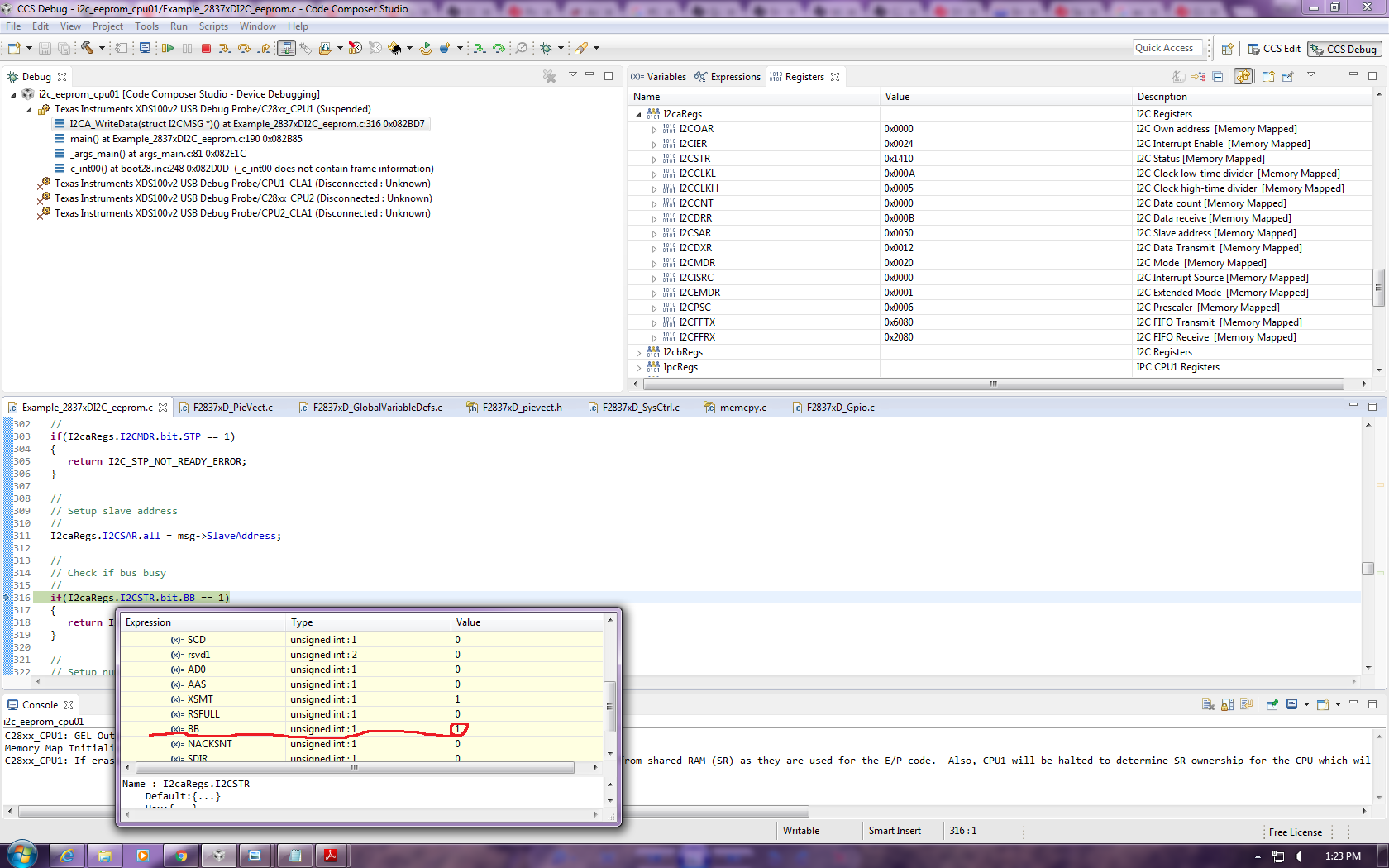
Then I powered the LaunchPad from a computer USB port, built the project (FLASH mode), no error. Under debug mode, when the program is running, I expected to see at least SCL pulses from GPIO33, but except for a constant 3.3V signal, I did not observe anything from oscilloscope. I checked I2CA registers, the values have changed and busbusy is HIGH. A screenshot of the registers are attached here
Stuck here for sometime, please help!
Many thanks in advance!
CY