Part Number: LAUNCHXL-F28069M
Hello,
I've been succesfully running my PMSM in labs 12a-13a. Speed control works really well also at lower speeds.
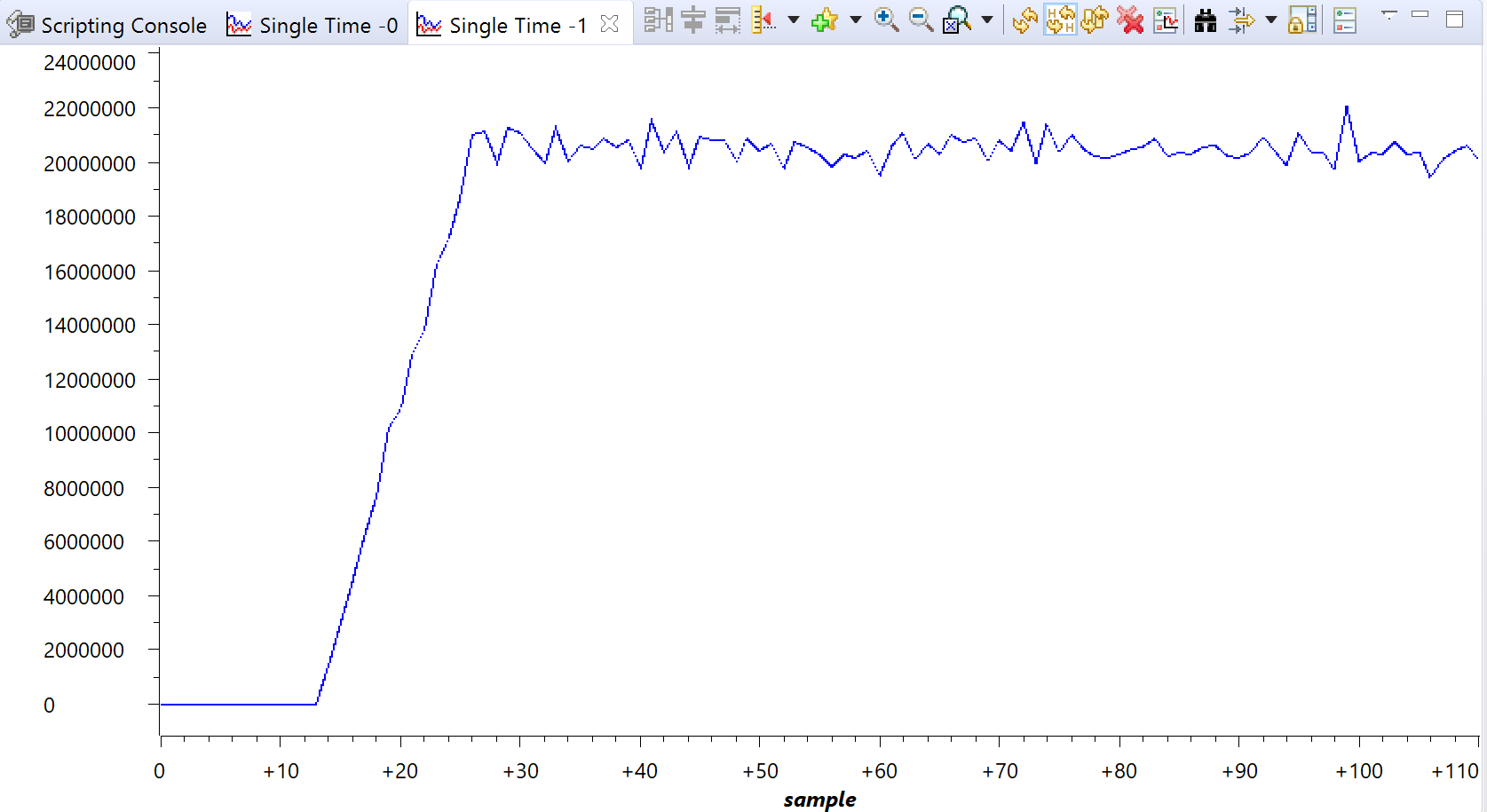
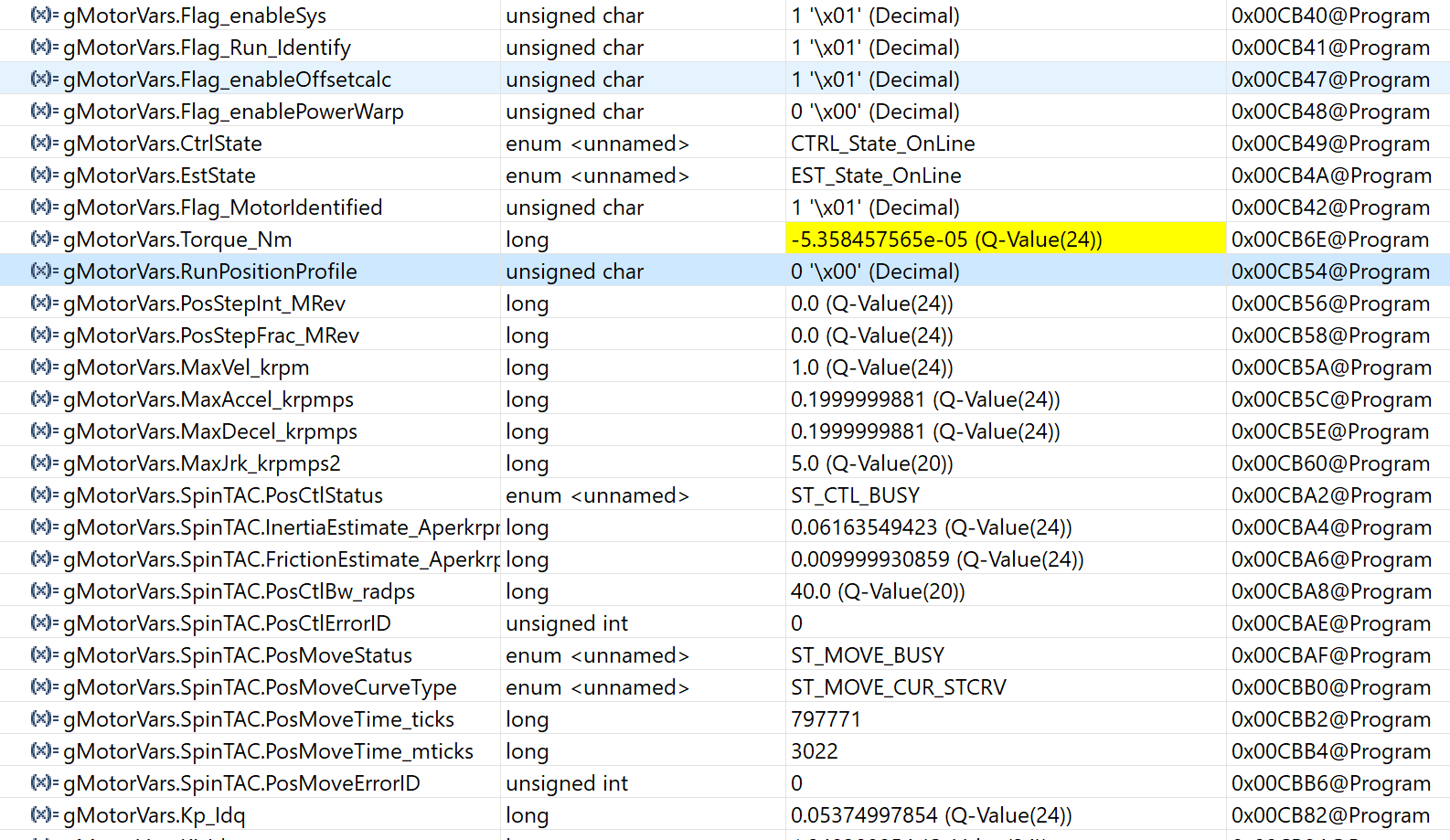
In lab 13B, I have a wierd problem. When I turn on the position step, the motor starts running and accelerates to the max velocity set and does not stop without disabling the system. This is not dependent on the gMotorVars.PosStepInt_MRev” and “gMotorVars.PosStepFrac_MRev variables and the system is not giving any error code in either gMotorVars.SpinTAC.PosCtlErrorID or gMotorVars.SpinTAC.PosMoveErrorID. User.h and hw settings are identical than in previous labs. Thought initially that increasing loop decimations would help but unfortunately it did not have impact.
Any idea of possible mistakes?
[edited 13a -> 13b]