Tool/software: Code Composer Studio
Hello.
I am exploring compensation behavior using the TIEVM-HV-1PH-DCAC demo board.
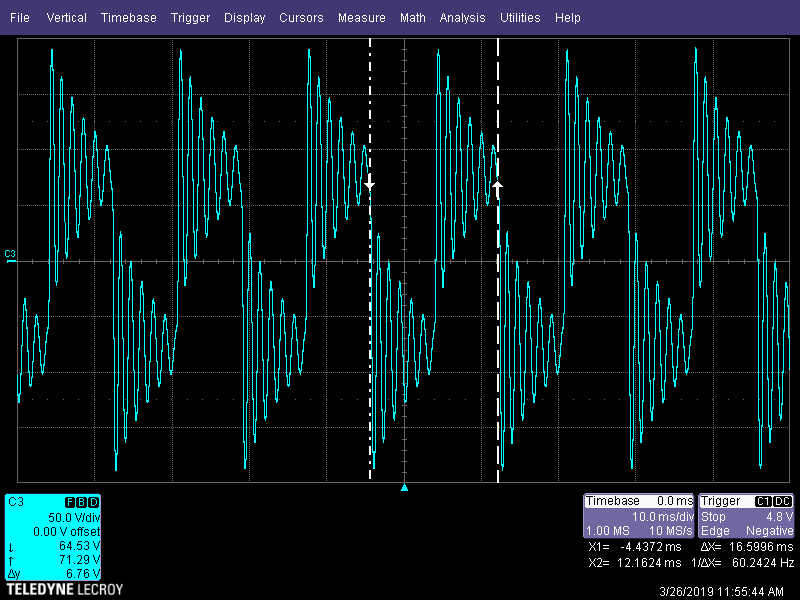
I code the demonstration source as equally as possible, but the output oscillates.
I set the PWM, ADC, and compensation parameters the same.
I am analyzing for more than one week, but it is difficult for me to work on compensation myself for the first time.
The source code was saved using Project> Export> General> Archive File.
I hope you will take a look at the source code.
I need your support.
Thank you.