



Other Parts Discussed in Thread: MOTORWARE
Tool/software: Code Composer Studio
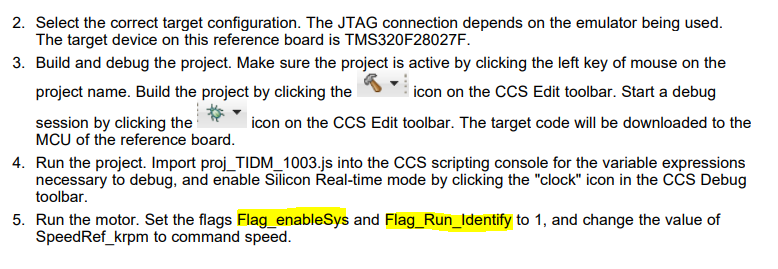
Hello! I have made a PCB with the same schematic as the TIDM-1003 design. I have uploaded the code that belongs with TIDM-1003 but I am unsure of how to make it start :) I try to follow the steps below:
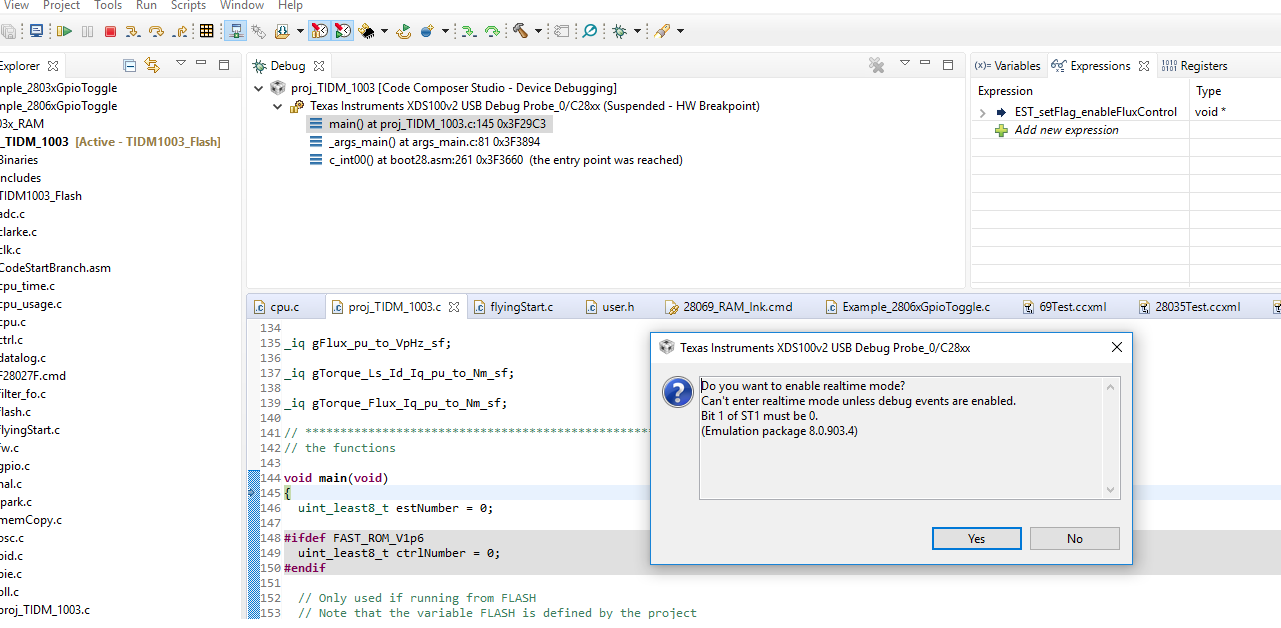
On step 4. I get a message when I click the "clock" symbol. I simply click "Yes" but am not sure if anything is wrong here:
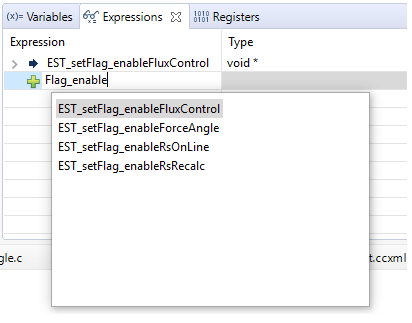
In step 5. I cannot find the variables "Flag_enableSys" and "Flag_Run_Identify". Look at the figure below, am I looking in the correct place?
Would be grateful for any help :) BR Niclas
