Tool/software: Code Composer Studio
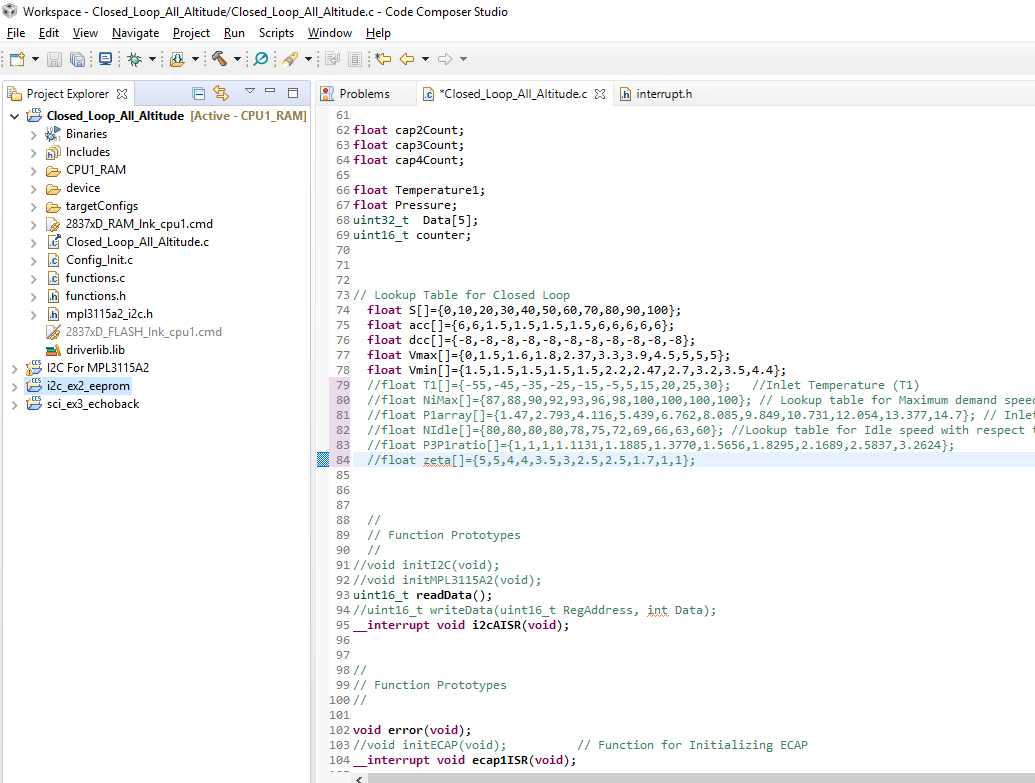
I was working on program One part which contains I2C and other part contains ECAP, SCI etc modules.
First I made them separate because i am new learner.
Both were separate working fine.
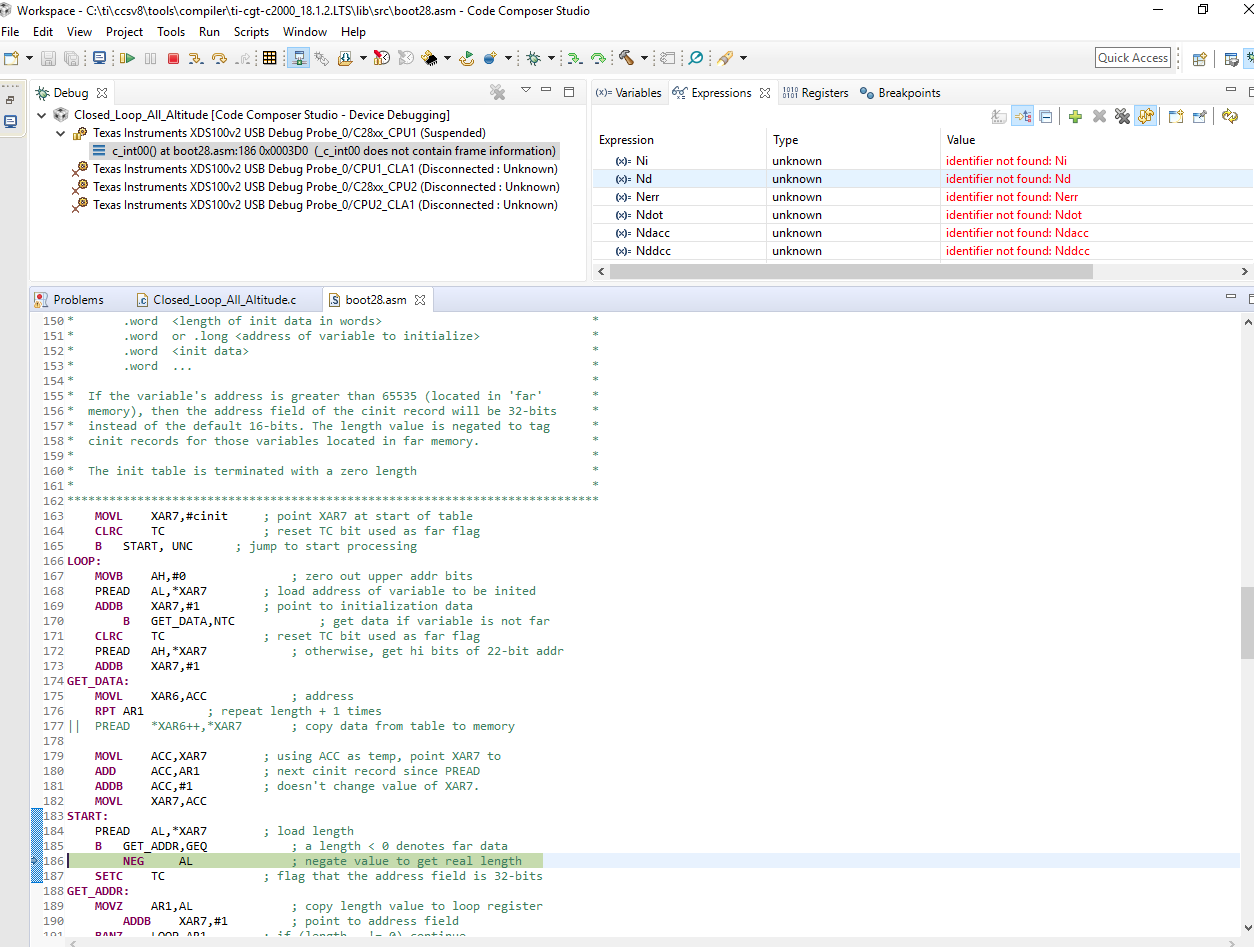
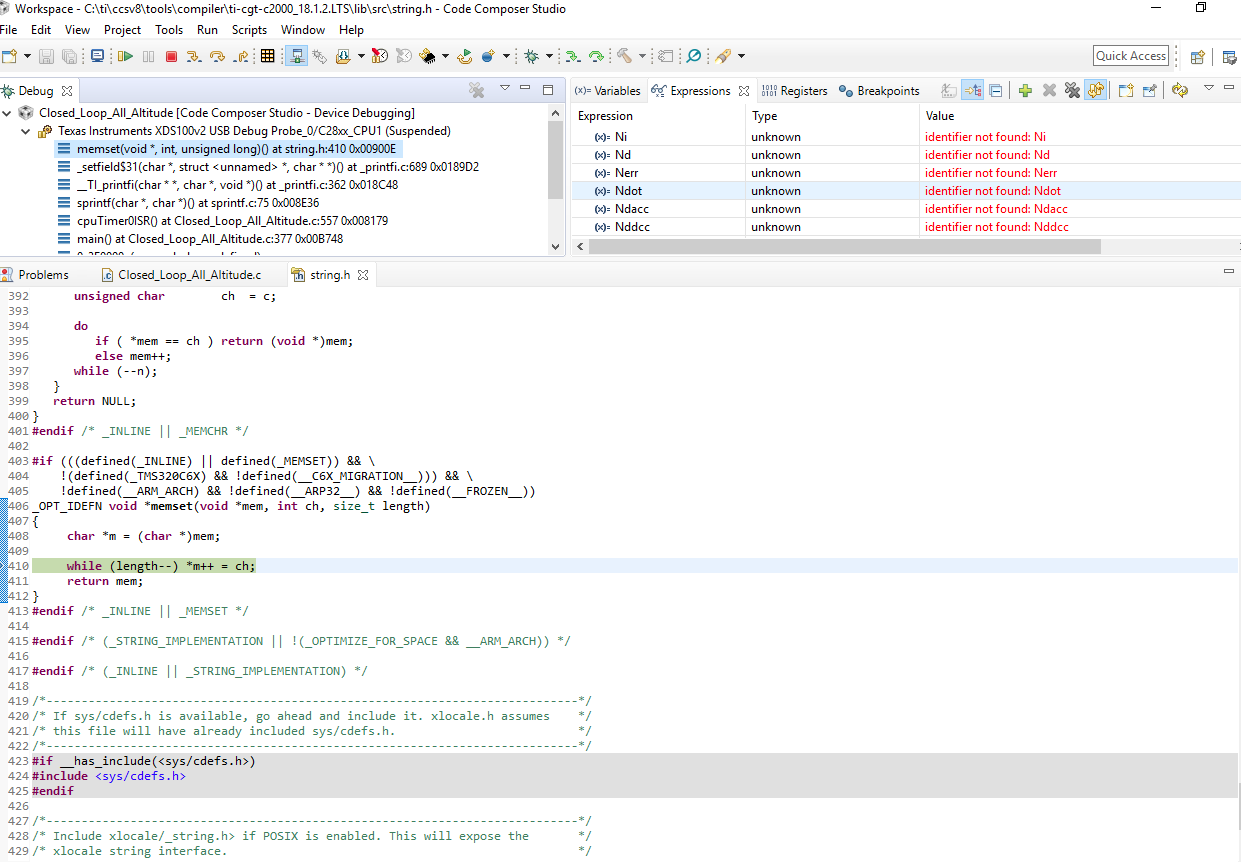
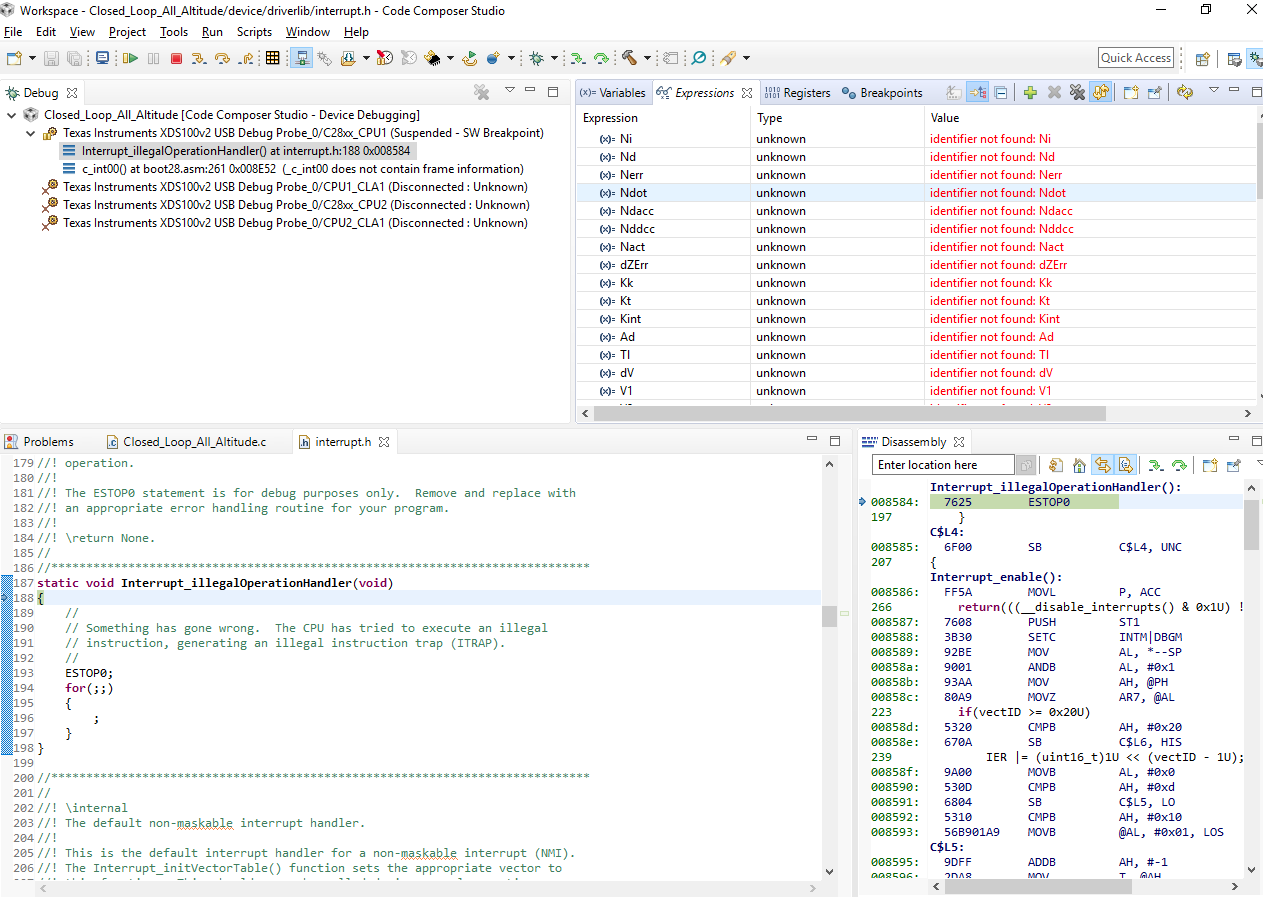
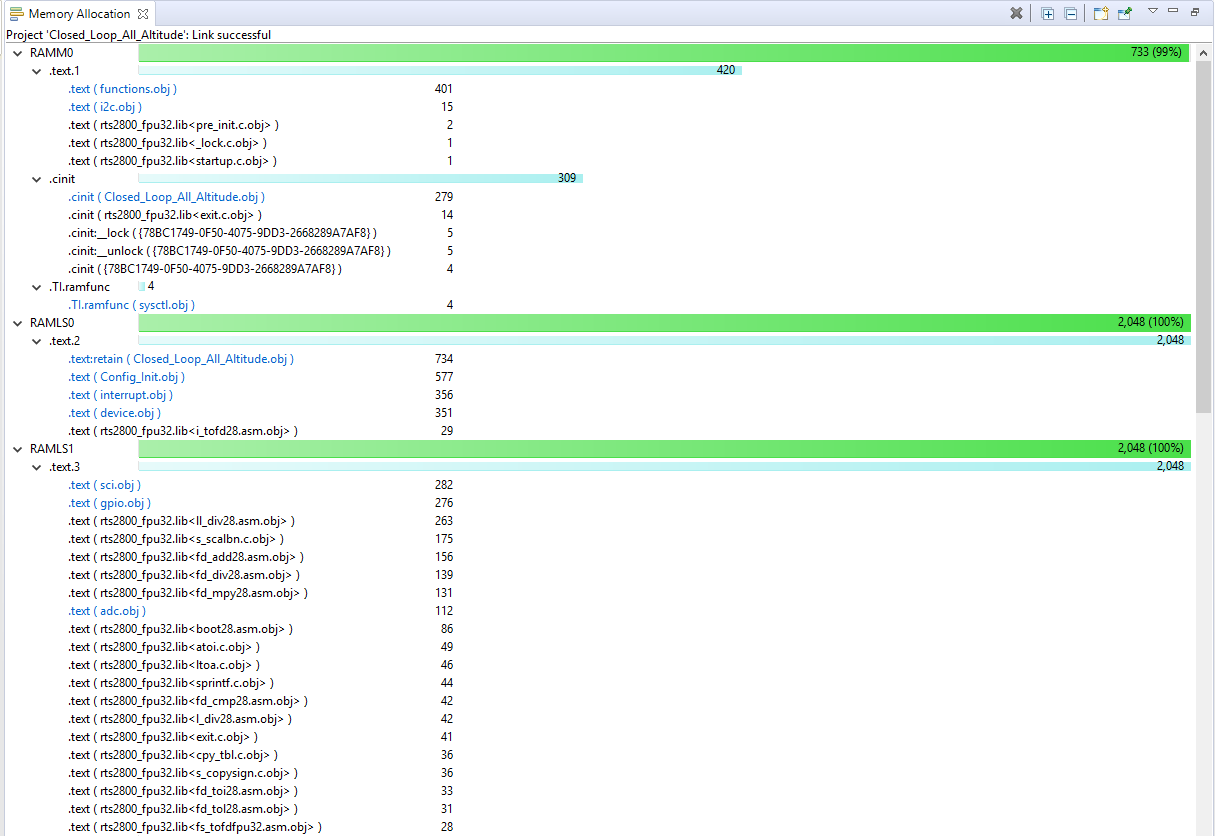
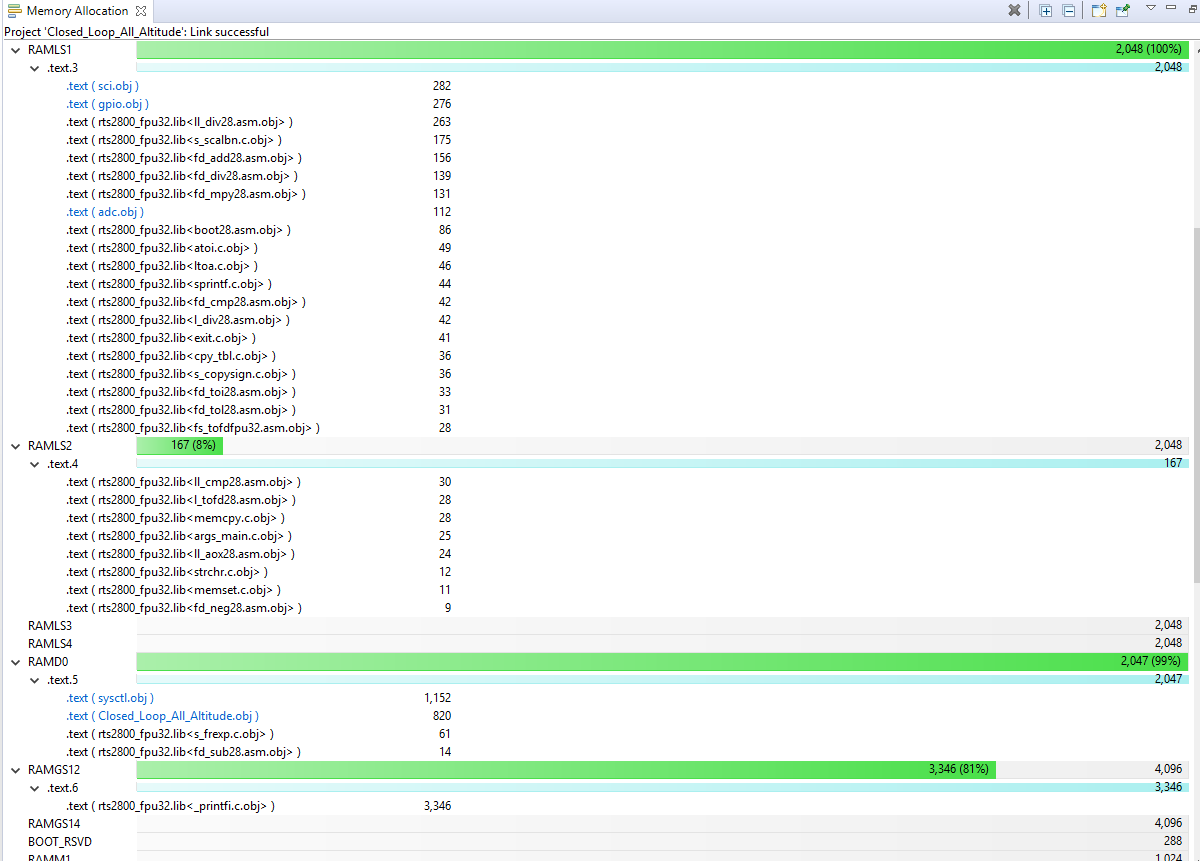
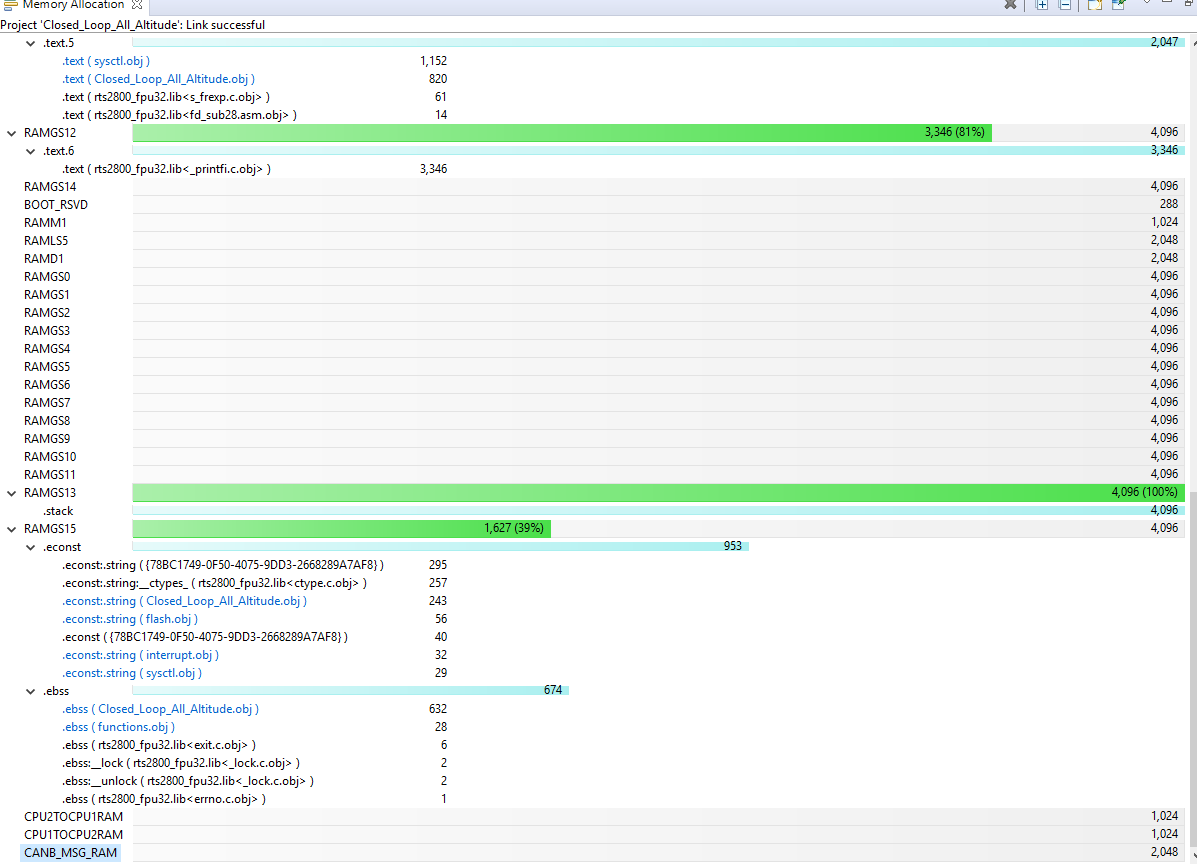
But when i tried to combine these two program now it is getting caught in PROCESS CINIT INITIALIZATION TABLE.
Why is it so ? & How to get out of this ?