


Part Number: DRV8301-HC-C2-KIT
Hi
I am using a DRV8301-HC-EVM Rev D with a DRV8301 control card
I am trying to work through the PM Sensorless project.
I have made modifications to the settings to suit the motor we are using:
- these include setting motor R, L, poles and Base Freq
- current sense gain
- and increasing the ISR freq to 40KHz
For our application we are required to spin counter clockwise so I am using a target speed ref that is < 0.
We have hall sensors on the motor but would like to use FOC control as on testing it greatly improves acoustic noise.
We have no QEP encoder
With the loop closed around winding current we appear to spin smoothly: I can see that the hall signal becomes nicely locked to a single frequency on a scope
- looking at the speed3.EstimatedSpeed variable it is always within a couple of % of the target (SpeedRef)
- similarly measuring the time between entering the same "HallState" form the measure hall sensors looks to be giving a solid
However as soon as I switch to speed control in BUILDLEVEL 7 the motor stops
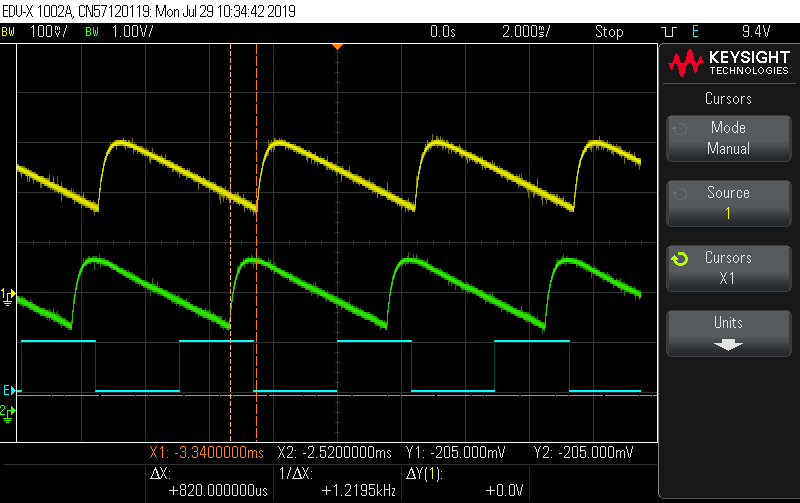
I notice that the lag between smo1.theta and rg1.out would be about 60deg (820us in a 4.95mS revolution - output on PWMDAC)
- however trying to adjust Kslf and Kslide do not appear to be able to reduce this in any way
I am presuming this discrepancy between the estimated and generated angle is likely the cause of the crash when switching to a speed control loop? as from the code it would appear that swapping the rg1.out for the smo1.theta is one of the key differences?
I would be grateful for any suggestions as to how to see this lab to completion
- and also if there are any recommendations for how best to incorporate hall feedback in to a FOC control scheme
Kind regards,
- Richard
