Other Parts Discussed in Thread: CONTROLSUITE
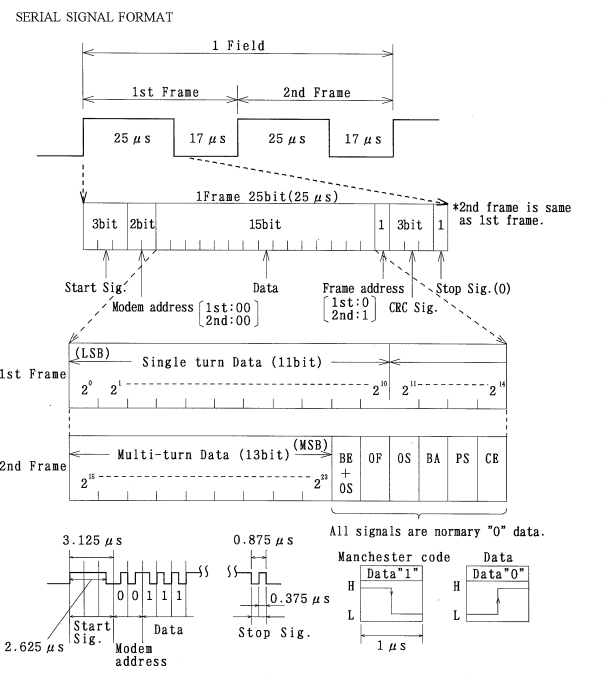
I have a TMDXIDDK379D board and trying to run with my motor which has a Tamagawa encoder which outputs absolute position in manchester coded data through serial (the format is attached below). I was exploring what options I have to connect the encoder, and found out that you guys have a option T-Format position data. My question is the attached output signal format the same as the T-Format which board takes?
It's not working with my encoder. Is there something need before the serial input?
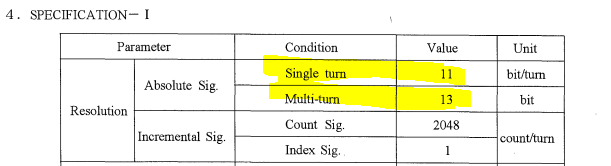
The T-Format document says its tested on TS5643N100 Tamagawa encode and that's what I am using. It also says the resolution is 17 bits but the the serial format from the spec sheet says 15 and 17?

Its not working for some reason and the resolution for this encoders