Dear Support,
I am using the SFRA tool to obtain the plant and open loop frequency response of the buck converter system controled an F28035.According to the SFRA Module User ‘s Guide,I have added the necessary codes and function.Now ,I find the results measured recently are different from the ideal outcoms. But the whole system is not stable and has strong oscillation,so,I cannot use the Compensation Designer to design compensator. Therefore, could you please provide me with an assist about how to measure the right bode plot of the buck converter ,i will be appreciate you,thank you.thank you.
This picture describe the ideal results.

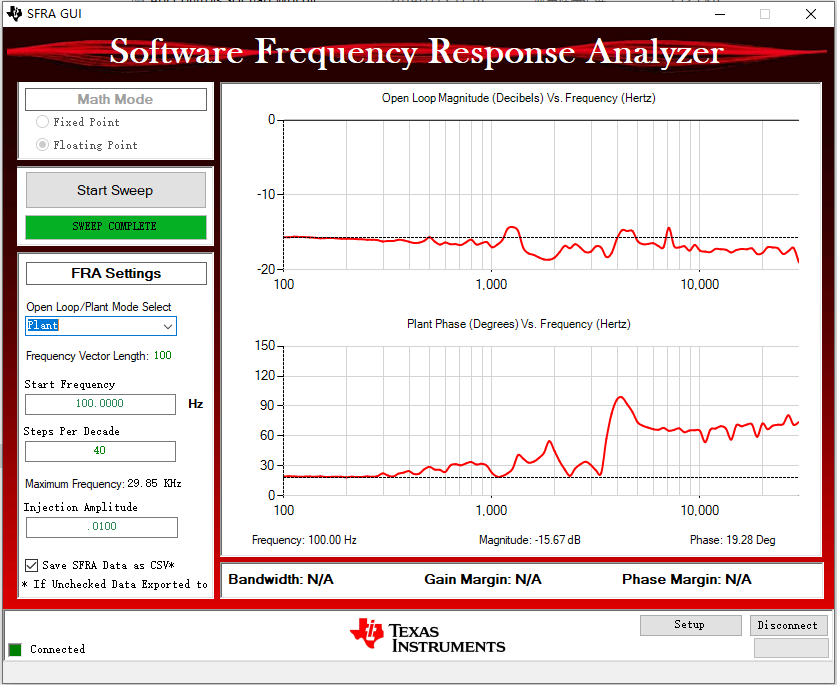
the next picture represent the unsatisfactory results measured by my own