Other Parts Discussed in Thread: LAUNCHXL-F28379D
Good evening,
I am using the 2MTR-DYNO kit with the TI F28379D LaunchPad with 2 BOOSTXL-DRV8305 booster packs.
The code that i load on the board is obtained by playing the Simulink model obtained through commands c28379Dpmsmfocdual_cpu1_ert and c28379Dpmsmfocdual_cpu2_ert.
(It performes a Permanent Magnet Synchronous Motor Field-Oriented Control).
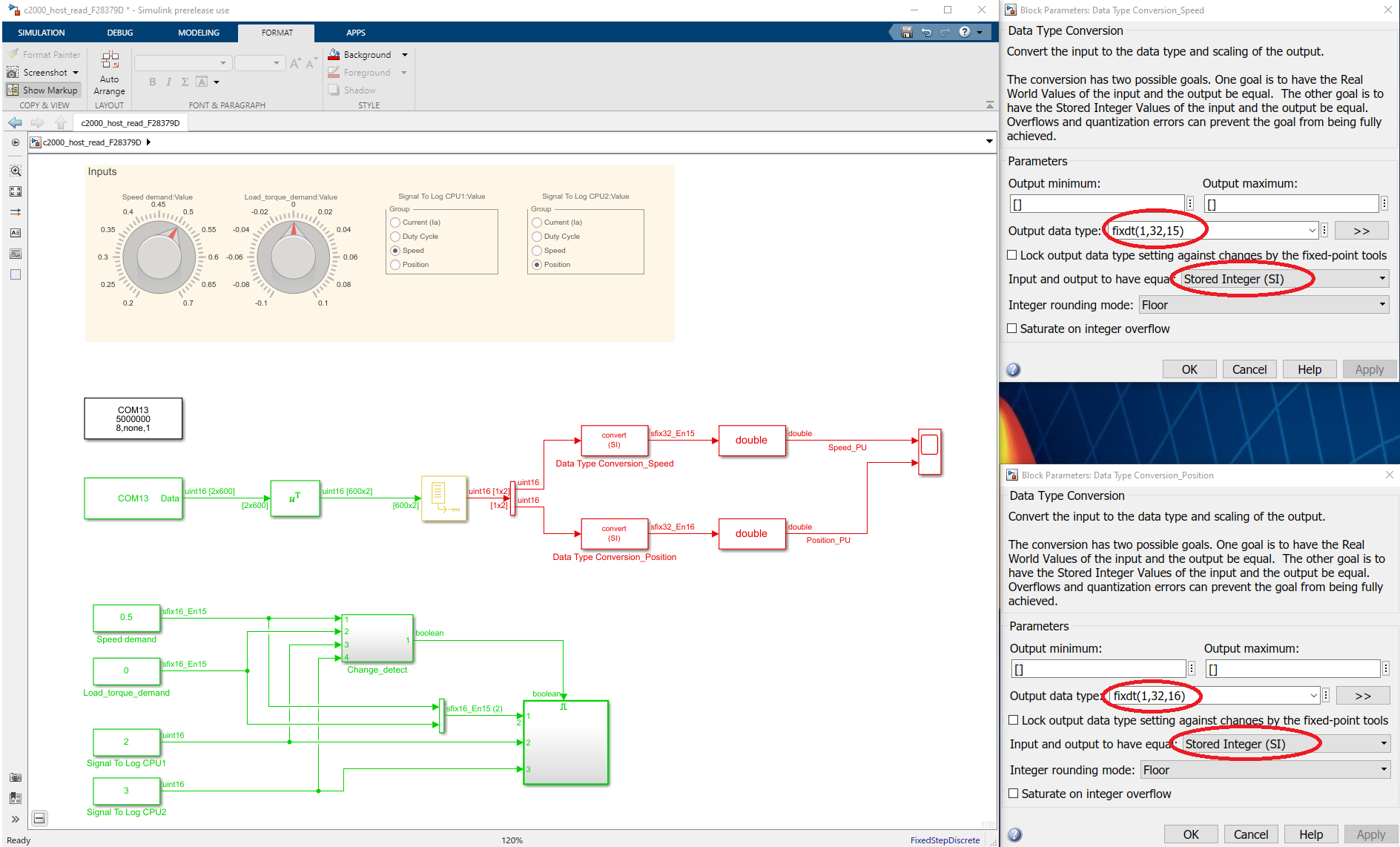
I am also using the Matlab instruction c2000_host_read_F28379D, in order to get data from the boards.
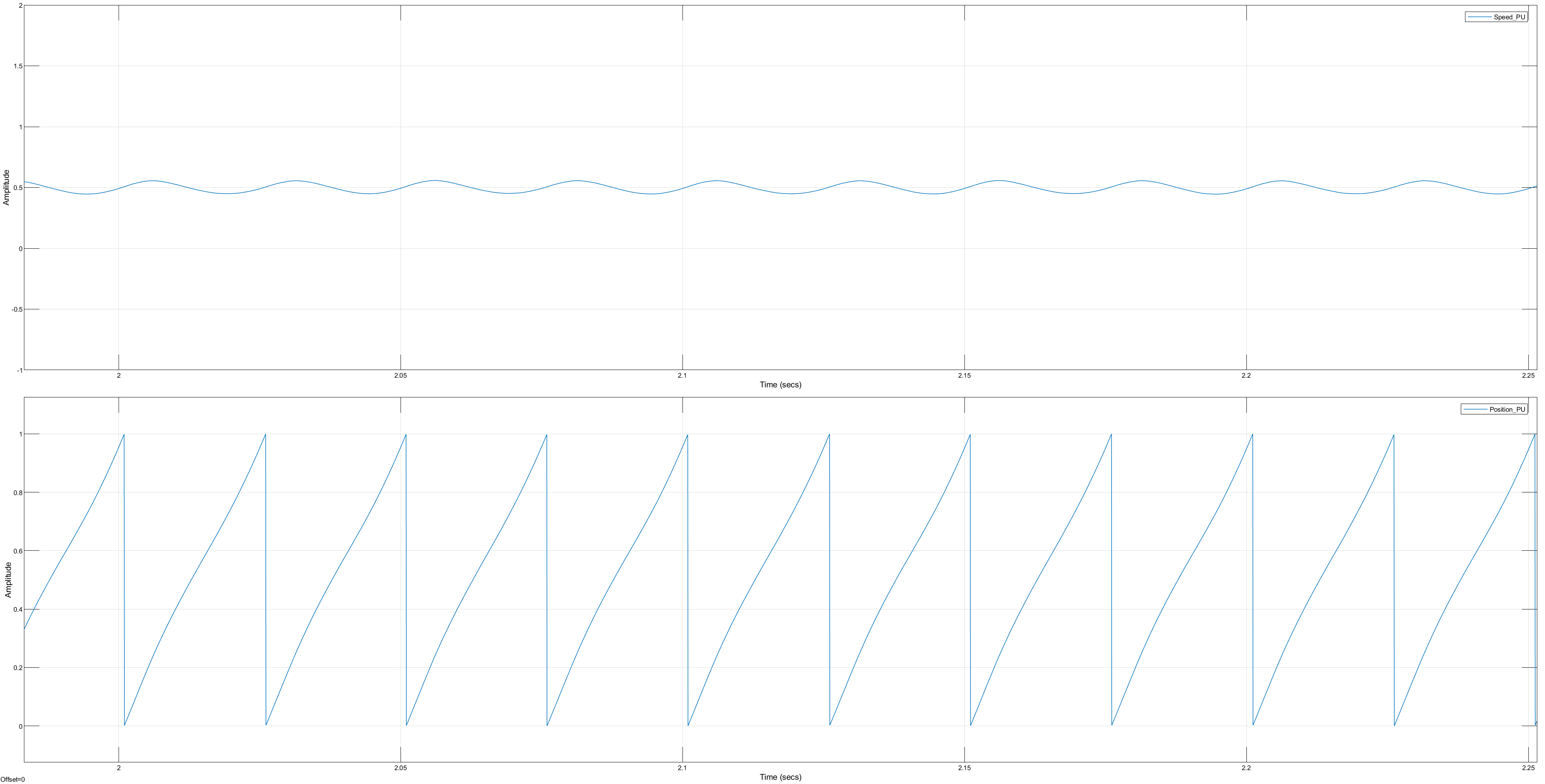
Everything seems to work weel, but I really don't find out which UNITS OF MEASURE I see in the 4 plots of c2000_host_read_F28379D.
Now, questions about the two circular indicators:
1) the Speed Demand from 0.2 to 0.7 what does it mean? Is a percentage of the maximum speed of the motor?
Because I don't find any connection between that value and the plotted signal of speed.
2) Regarding the load torque demand: is it Newton per meter ?
After that.. about the plots: for current I suppose they are milliAmperes, since the sinusoidal curves have average value of 2300, but I'm still not sure. Is it like that?
3) What about speed, duty cicle and position? I am very interested in understanding above all the unit measure for the speed, since it seems to be grades/second.
Could it be?
Thank you,
I hope you can help me