Other Parts Discussed in Thread: ADS7254
Dear sir/Madam,
I am using ads7254 external ADC with LaunchPad TMS320F28379D using SPI. I have tried the loopback example and works correctly. but when I load configuration with ADC, I read "0" in "SpiaRegs.SPIRXBUF" register. The DSP is in master mode, SPI clock is 500KHz.
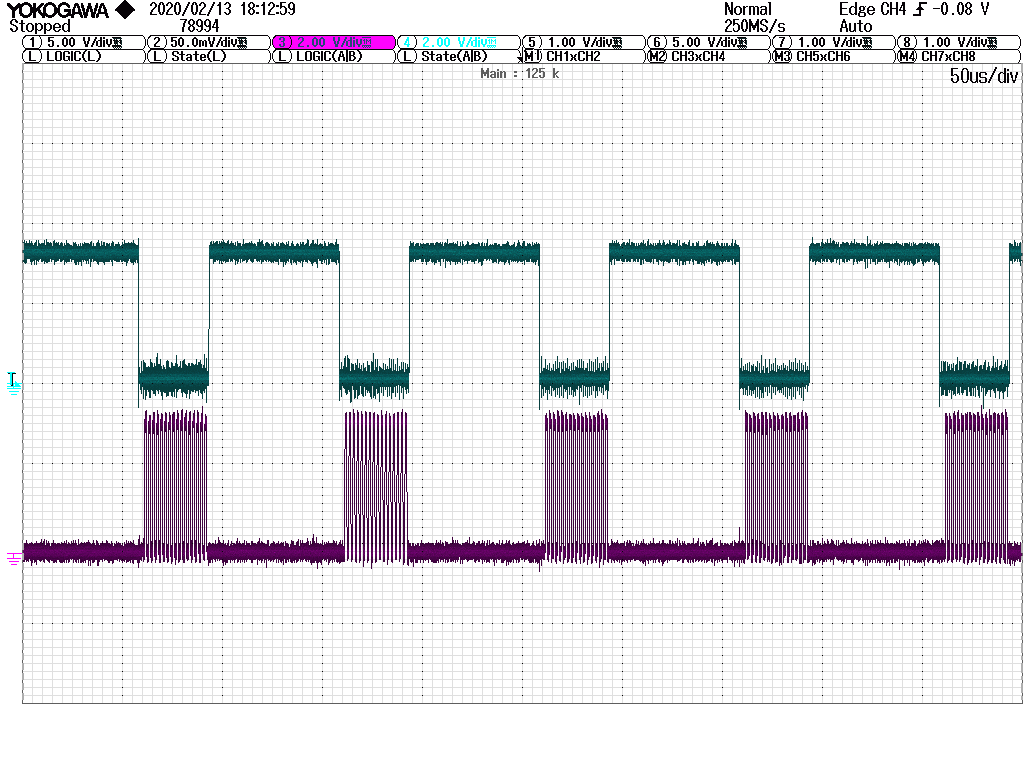
I am not receiving anything on SPISOMI, I read 0 always, whenever there is clock. When clock is not present it goes high. Also, there is delay between two SPI channels, which I do not understand why ?
I attach below the SPI configuration. I have also tried to send to ADC 0x0800 instead of 0x8800, as I want to work in 16-CLK, Dual-SDO Mode (CFR.B11 = 1, CFR.B10 = 0),but I read 0 all the time.
Thank you.
#define SPI_BRR ((200E6 / 4) / 500E3) - 1
//============== SPI - A ======================
//===============================================
//Init GPIO SPIA
EALLOW ;
GpioCtrlRegs.GPBPUD.bit.GPIO58 = 0; // Enable pull-up on GPIO16
GpioCtrlRegs.GPBPUD.bit.GPIO59 = 0; // Enable pull-up on GPIO17
GpioCtrlRegs.GPBPUD.bit.GPIO60 = 0; // Enable pull-up on GPIO18
GpioCtrlRegs.GPBPUD.bit.GPIO61 = 0; // Enable pull-up on GPIO19
GpioCtrlRegs.GPBQSEL2.bit.GPIO58 = 3;
GpioCtrlRegs.GPBQSEL2.bit.GPIO59 = 3; // Asynch input GPIO17
GpioCtrlRegs.GPBQSEL2.bit.GPIO60 = 3; // Asynch input GPIO18
GpioCtrlRegs.GPBQSEL2.bit.GPIO61 = 3; // Asynch input GPIO19
GpioCtrlRegs.GPBGMUX2.bit.GPIO58 = 3; // Configure GPIO16 as SPI
GpioCtrlRegs.GPBGMUX2.bit.GPIO59 = 3;
GpioCtrlRegs.GPBGMUX2.bit.GPIO60 = 3;
GpioCtrlRegs.GPBGMUX2.bit.GPIO61 = 3;
GpioCtrlRegs.GPBMUX2.bit.GPIO58 = 3;
GpioCtrlRegs.GPBMUX2.bit.GPIO59 = 3; // Configure GPIO17 as SPI
GpioCtrlRegs.GPBMUX2.bit.GPIO60 = 3; // Configure GPIO18 as SPI
GpioCtrlRegs.GPBMUX2.bit.GPIO61 = 3; // Configure GPIO19 as SPI
GpioCtrlRegs.GPBDIR.bit.GPIO58 = 1;
GpioCtrlRegs.GPBDIR.bit.GPIO59 = 0;
GpioCtrlRegs.GPBDIR.bit.GPIO60 = 1;
GpioCtrlRegs.GPBDIR.bit.GPIO61 = 1;
//============== SPI - B ======================
//========== Init GPIO SPIB ================
GpioCtrlRegs.GPAPUD.bit.GPIO24 = 0; // Enable pull-up on GPIO24
GpioCtrlRegs.GPAPUD.bit.GPIO25 = 0; // Enable pull-up on GPIO25
GpioCtrlRegs.GPAPUD.bit.GPIO26 = 0; // Enable pull-up on GPIO26
GpioCtrlRegs.GPAPUD.bit.GPIO27 = 0; // Enable pull-up on GPIO27
GpioCtrlRegs.GPAQSEL2.bit.GPIO24 = 3; // Asynch input GPIO24
GpioCtrlRegs.GPAQSEL2.bit.GPIO25 = 3; // Asynch input GPIO25
GpioCtrlRegs.GPAQSEL2.bit.GPIO26 = 3; // Asynch input GPIO26
GpioCtrlRegs.GPAQSEL2.bit.GPIO27 = 3; // Asynch input GPIO27
GpioCtrlRegs.GPAGMUX2.bit.GPIO24 = 1; // Configure GPIO24
GpioCtrlRegs.GPAGMUX2.bit.GPIO25 = 1;
GpioCtrlRegs.GPAGMUX2.bit.GPIO26 = 1;
GpioCtrlRegs.GPAGMUX2.bit.GPIO27 = 1;
GpioCtrlRegs.GPAMUX2.bit.GPIO24 = 2; //as SPI
GpioCtrlRegs.GPAMUX2.bit.GPIO25 = 2; // Configure GPIO25 as SPI
GpioCtrlRegs.GPAMUX2.bit.GPIO26 = 2; // Configure GPIO26 as SPI
GpioCtrlRegs.GPAMUX2.bit.GPIO27 = 2; // Configure GPIO27 as SPI
GpioCtrlRegs.GPADIR.bit.GPIO24 = 1;
GpioCtrlRegs.GPADIR.bit.GPIO25 = 0;
GpioCtrlRegs.GPADIR.bit.GPIO26 = 1;
GpioCtrlRegs.GPADIR.bit.GPIO27 = 1;
EDIS;
void spi_init(){
//Init SPI A
SpiaRegs.SPICCR.bit.SPISWRESET=0;
SpiaRegs.SPICCR.bit.CLKPOLARITY=0; //Output Rising Edge, Input is latched Falling Edge
SpiaRegs.SPICCR.bit.HS_MODE =0; // High Speed Mode DISABLE
SpiaRegs.SPICCR.bit.SPICHAR=15;
SpiaRegs.SPICCR.bit.SPILBK=0; //Loopback Disable (Testing Mode)
SpiaRegs.SPICTL.bit.MASTER_SLAVE = 1;
SpiaRegs.SPICTL.bit.TALK = 1;
SpiaRegs.SPICTL.bit.CLK_PHASE = 0;
SpiaRegs.SPICTL.bit.SPIINTENA = 0;
SpiaRegs.SPIBRR.bit.SPI_BIT_RATE=SPI_BRR ;
SpiaRegs.SPICCR.bit.SPISWRESET=1;
//Init SPI B
SpibRegs.SPICCR.bit.SPISWRESET=0;
SpibRegs.SPICCR.bit.CLKPOLARITY=0; //Output Rising Edge, Input is latched Falling Edge
SpibRegs.SPICCR.bit.HS_MODE =0; // High Speed Mode DISABLE
SpibRegs.SPICCR.bit.SPICHAR=15;
SpibRegs.SPICCR.bit.SPILBK=0; //Loopback Disable (Testing Mode)
SpibRegs.SPICTL.bit.MASTER_SLAVE = 1;
SpibRegs.SPICTL.bit.TALK = 1;
SpibRegs.SPICTL.bit.CLK_PHASE = 0;
SpibRegs.SPICTL.bit.SPIINTENA = 0;
SpibRegs.SPIBRR.bit.SPI_BIT_RATE=SPI_BRR ;
SpibRegs.SPICCR.bit.SPISWRESET=1;
}
__interrupt void epwm1_isr(void)
{
SpiaRegs.SPITXBUF = 0x8800 ;
SpibRegs.SPITXBUF = 0x8800 ;
while (! SpiaRegs.SPISTS.bit.INT_FLAG ) {}
SPI_I_A = SpiaRegs.SPIRXBUF;
while (! SpibRegs.SPISTS.bit.INT_FLAG ) {}
SPI_I_B = SpibRegs.SPIRXBUF;
}