Other Parts Discussed in Thread: MOTORWARE
Hi,
I have few questions in the PI tuning of the Speed Controller. I am comparing these parameters between InstaSPIN-FOC User's Guide and the Code for the Lab 06 and 07.
- pUserParams->BWc_rps - Bandwidth of the current controller (rad/s)
- Which is already converted in the rad/s from the user entered values (which is in Hz) in user.c file.
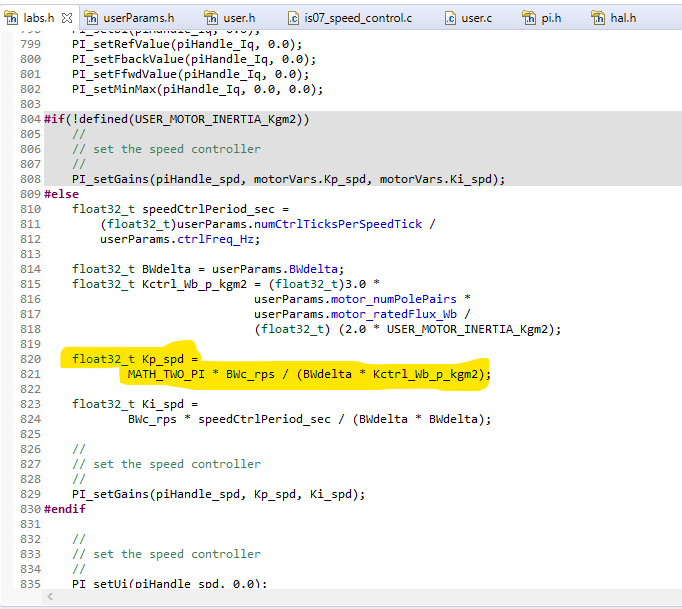
- However, in the setupControllers(void) function, during the Kp_spd (P gain for speed controller), it is again multiplied by MATH_TWO_PI. Which gives fairly high P gain value than expected.
- The question is, Which equation is correct the one used in the code or the one in the User's Guide?
- Which is already converted in the rad/s from the user entered values (which is in Hz) in user.c file.
- pUserParams->BWdelta
- Is it the damping factor (delta) mentioned in the chapter 11 of user's guide? If not what's the relation between them?
- Is it the damping factor (delta) mentioned in the chapter 11 of user's guide? If not what's the relation between them?
- Digitization of these PI Values
- Does this Kp_spd value needs to be digitized same as Ki_spd?
- Because based on the explanation in the user's guide and its code implementation, only Ki_spd value is multiplied by controller period.
- Does this Kp_spd value needs to be digitized same as Ki_spd?
Best,
Amit