Other Parts Discussed in Thread: DRV8323, BOOSTXL-DRV8323RS, TMDSCNCD28388D
Hello,
We are currently implementing FOC using both TMS320F28388D and DRV8323RS gate to control PMSM motors.
But when we look at the currents we clearly see a current overshoot that can become a problem in certain cases.
Here it is:
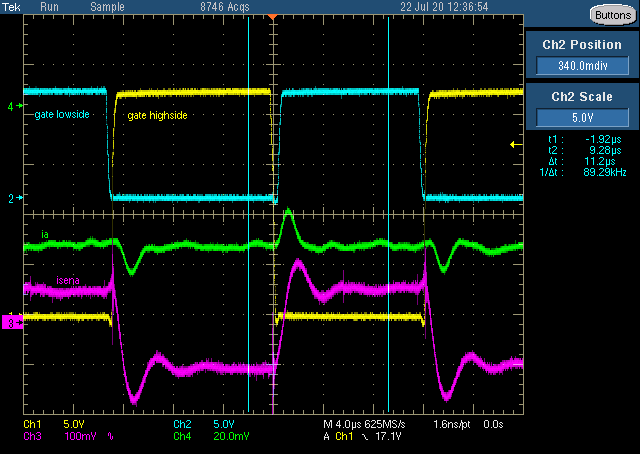
The different channels are:
Yellow: Gate High side PWM
Blue; Gate Low side PWM
Green; Real phase current (measured thanks to a current probe)
Purple: DRV ISENA pin (filtered current sense pin)
We see here that each time the transistors are switching, an overshoot or an undershoot occurs in the motor phases.
However the current should remain constant because of the induction of the motor phase.
Also, the undershoot over the low side shunt resistor shouldn't happen when the low side transistor is open, the current should go to zero very quickly.
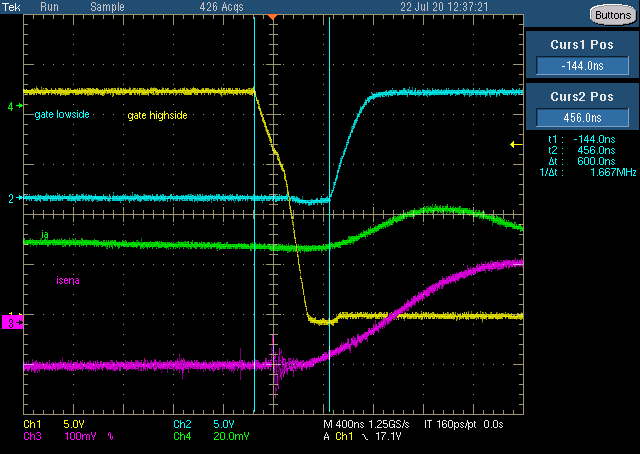
Here is the same measurement zoomed on the transition:
Do you have an idea of what is causing this ?
Thanks in advance.