Other Parts Discussed in Thread: MOTORWARE
Hello,
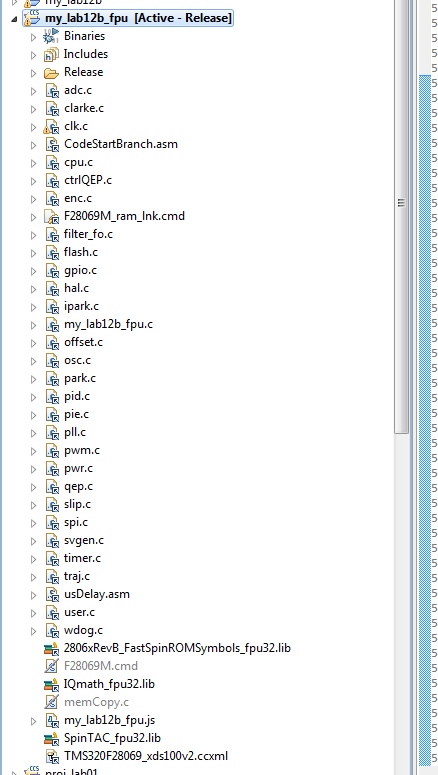
I want to start using the FPU on F28069M MCU with lab 12b. Is it feasible ? In the lab projects that are included in Motorware 13, none of projects that use Spintac are using the FPU. Is that with a reason?
What problems will I face in manually including the FPU libraries?
Best regards,
Paul