


I'm trying to measure the current from the InstaSpin board. I'm getting a total current measurement Is_A as follows:
// read Id and Iq vectors in amps gMotorVars.Id_A = _IQmpy(CTRL_getId_in_pu(ctrlHandle), _IQ(USER_IQ_FULL_SCALE_CURRENT_A)); gMotorVars.Iq_A = _IQmpy(CTRL_getIq_in_pu(ctrlHandle), _IQ(USER_IQ_FULL_SCALE_CURRENT_A)); // calculate vector Is in amps gMotorVars.Is_A = _IQsqrt(_IQmpy(gMotorVars.Id_A, gMotorVars.Id_A) + _IQmpy(gMotorVars.Iq_A, gMotorVars.Iq_A));
I am converting the Is_A IQ value by right shifting 24 bits.
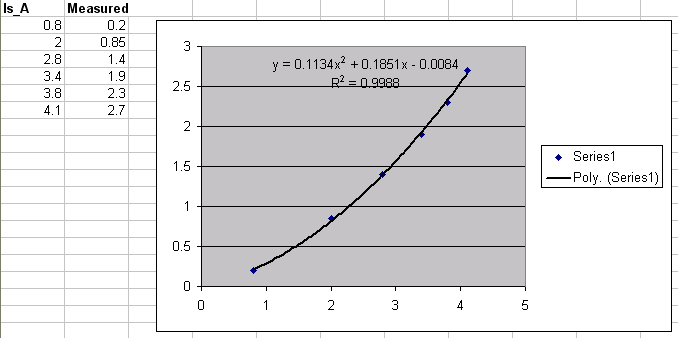
I have a current sensor connected that is measuring input current to the board and there is some discrepancy. There seems to be a second order polynomial fit between the Is_A and measured values. I am looking for some insight into what the units of Is_A are and why the second order fit?

