Hi,
I use C2000 Piccolo Launchap (f28027f+ DRV8301 BOOSTXL).
The motor IDs runs in lab2a or lab2c, but I didn’t obtain results like my datasheet.
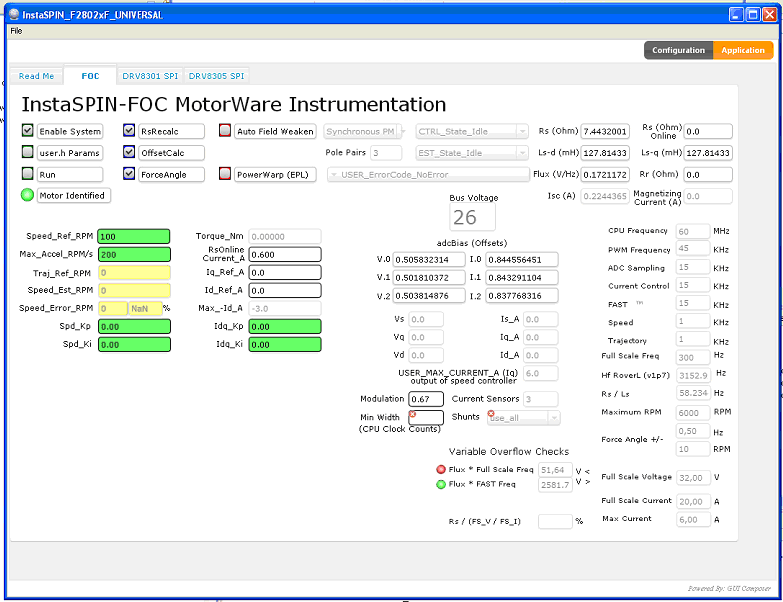
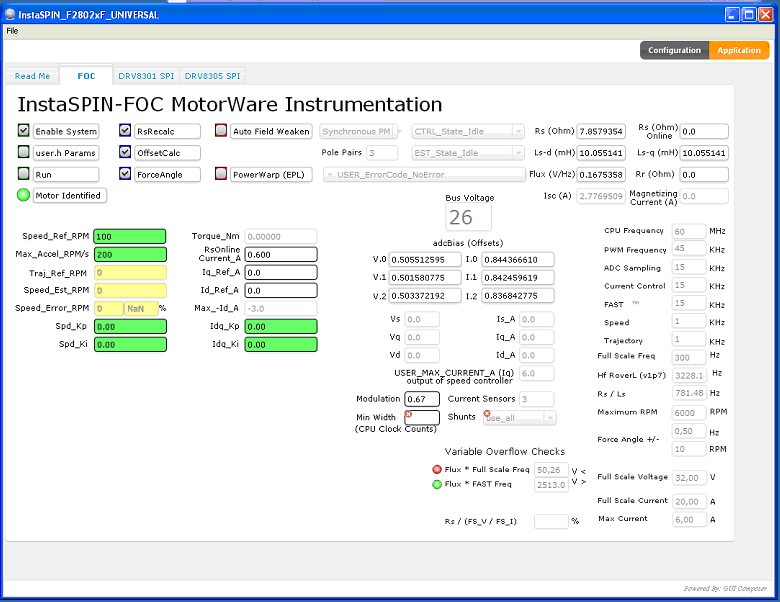
In my datasheet, the parameters of my PM motor are 32 V supply, Ls=0.0055 H and R=7.5 Ohm and npp=3.
I try to put the parameters of my datasheet into the user.h, I get a couple issues.
When, I want use Lab5b/Lab5c to find correct PI regulator, It is happened that:
USER_ErrorCode_IqFullScaleVoltage_V_Low appears and I can’t select Enable System .
In my user.h,
USER_IQ_FULL_SCALE_VOLTAGE_V = 24
- 0.5*MAX_CURRENT*USER_MOTOR_LS_D*USER_VOLTAGE_FILTER_POLE_RPS
- 0.5*8*0.0055*364.682 = 8
The condition is satisfied.
I don’t understand, why these problems are occurred… Someone can help me?