Other Parts Discussed in Thread: EVM430-FR6043
Hi,
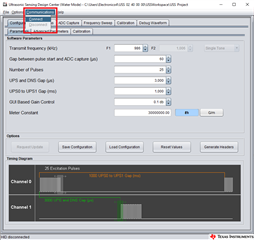
I'm working on the Water Flow Measurement project. By deafult, the Design Center GUI is used to communicate with the board and do the measurements. Because of my project requirements, I should not use the GUI and use only the code loaded in the board, to automate the process. I already found where volume flow rate and other parameters are set and used. Is there any way to modify the code in order to do what the Connect button GUI does?
Thanks in advance,
Alberto