


Hello,
I want my board to not detect any negative touch. Also I want to calibrate it exactly the same every time and only ONE time at the beginning. Is this possible in CCS?
Kind Regards
Hello,
I want my board to not detect any negative touch. Also I want to calibrate it exactly the same every time and only ONE time at the beginning. Is this possible in CCS?
Kind Regards


**Attention** This is a public forum
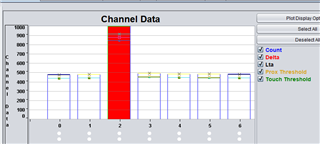
 Thats the sensorpad. If I flash now it will look like this.
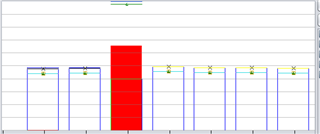
Thats the sensorpad. If I flash now it will look like this.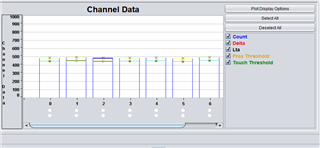 so there is no detect because the finger is not moving. I want to detect touch even if I flash the board while touching it.
so there is no detect because the finger is not moving. I want to detect touch even if I flash the board while touching it.