


Other Parts Discussed in Thread: THS1206, TMS320C6201, , ADS8342, TM4C123FH6PM

Hello,
I received the MCU MSP430 Vs ADC THS1206 EVM source code from the ADC forum at the address below.
https://e2e.ti.com/support/data-converters/f/73/p/911632/3390319#3390319
/cfs-file/__key/communityserver-discussions-components-files/73/THS1206.zip
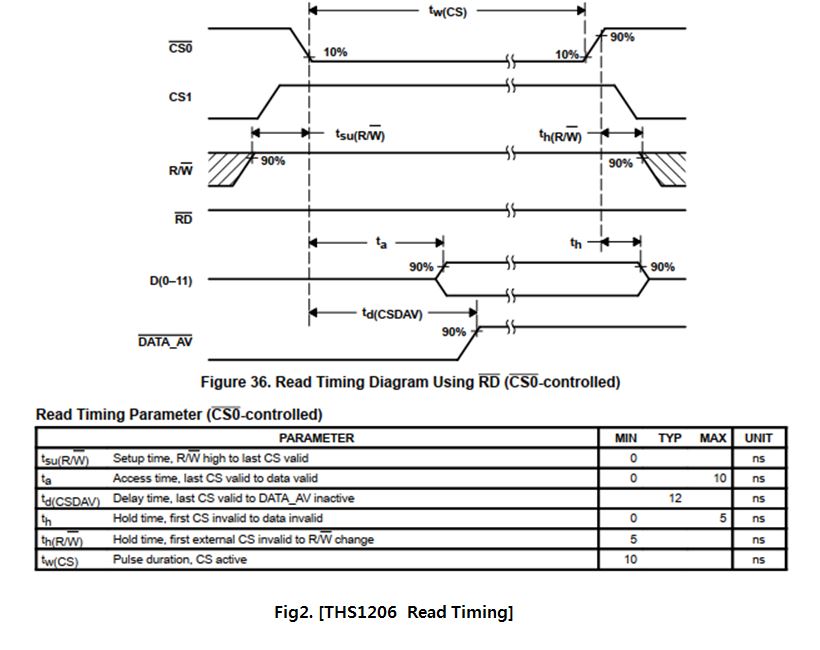
I am not sure how to make Read Timing like Fig2 using MSP430x44x GPIO mode.
Q1> How to make tw(CS), tsu(R/nW), th(R/nW) of /CS0 & CS1 signals by taking one of several signals as an example?
Could you please tell me where the source code is located at the address above?
Best Regards,
Jame, Shin


