Hello ,
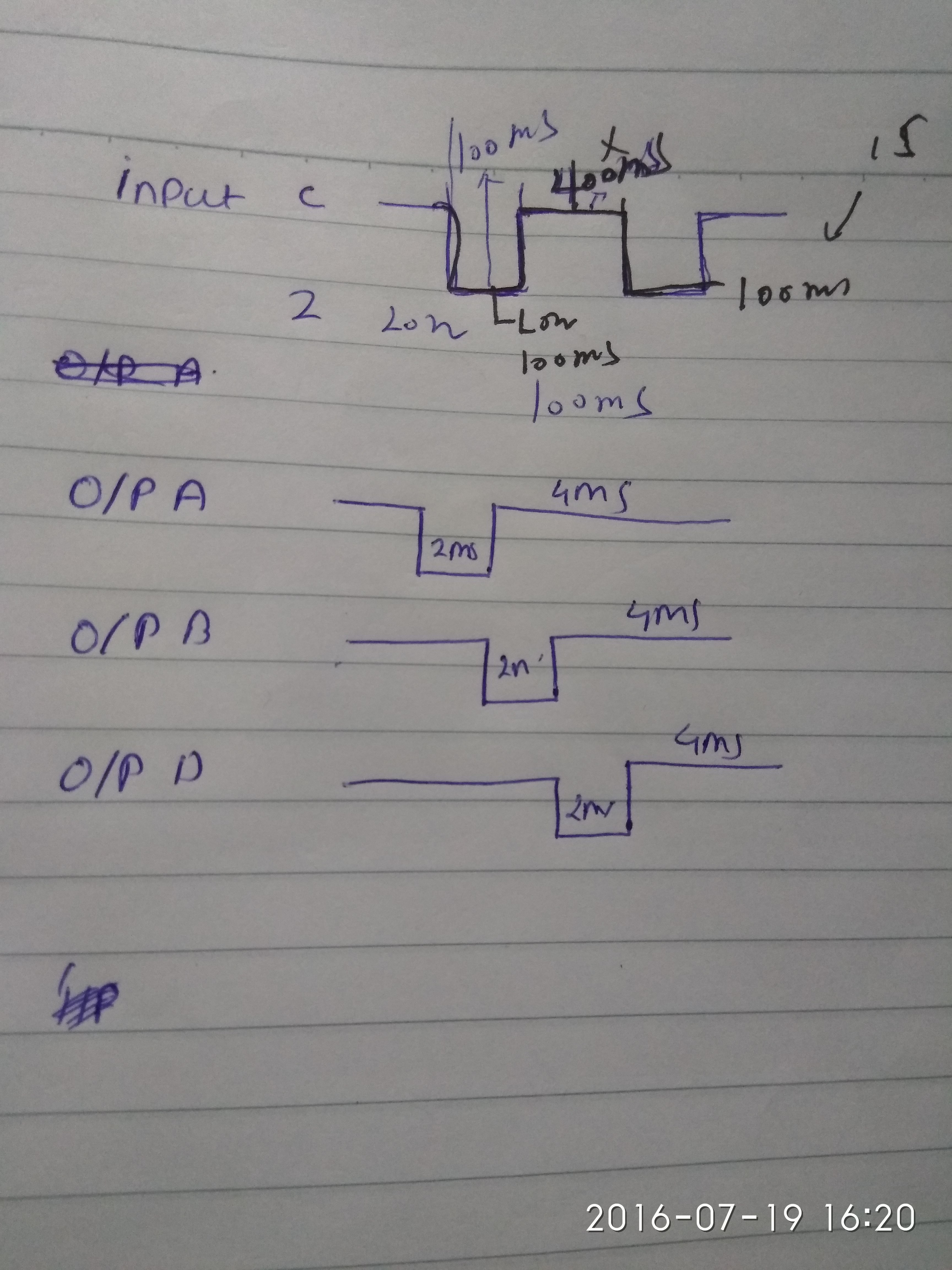
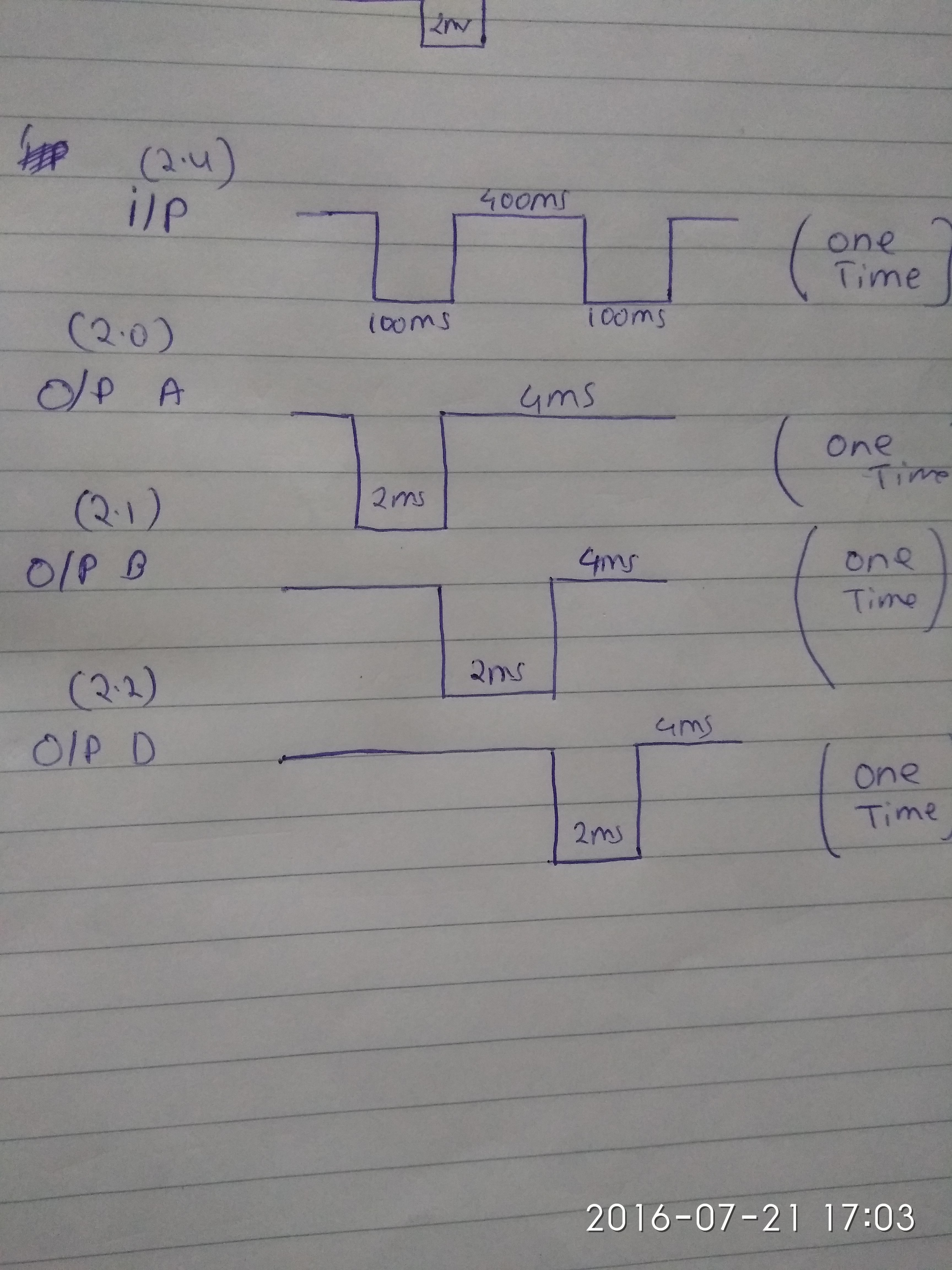
I want to generate this output:

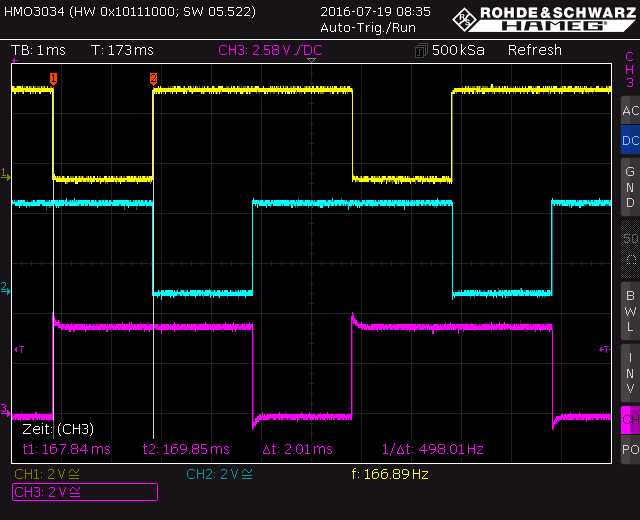
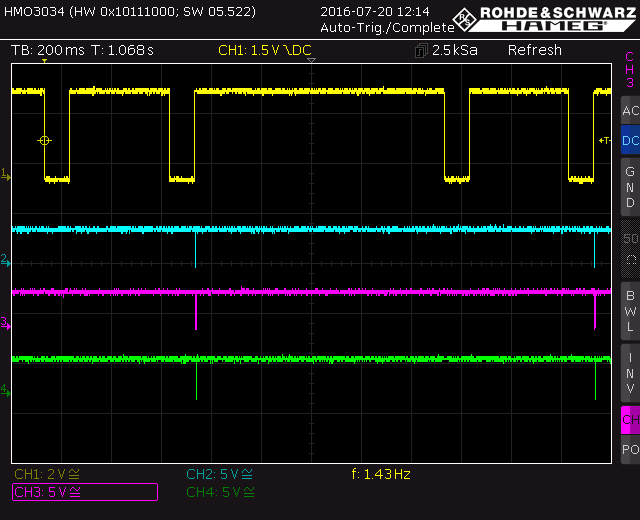
But i am getting this

Here is the code i am pasting, please help me anyone to generate that output :
#include <msp430g2553.h>
#define CPU_F ((double)16000000)
#define delay_us(x) __delay_cycles((long)(CPU_F*(double)x/1000000.0))
#define delay_ms(x) __delay_cycles((long)(CPU_F*(double)x/1000.0))
char C_1, C_2;
void System_Clock_Init( void )
{
char i;
_NOP();
WDTCTL = WDTPW + WDTHOLD; // Close Watching dog
delay_ms(20); // 1MHz
if( ( CALBC1_16MHZ == 0xff ) || ( CALDCO_16MHZ == 0xff ) ) // FLASH A was cleared!!!
((void (*)())RESET_VECTOR)();
BCSCTL1 = CALBC1_16MHZ; //ACLK=32768Hz
DCOCTL = CALDCO_16MHZ; //MCLK=DCOCLK=16MHz
BCSCTL2 = 0x06;//SMCLK=DCOCLK/8=2MHz
BCSCTL3 = 0x00;//cap=1pF
IE1 &= ~OFIE;//close crystal error interrupt
TA0CCR0 =32-1; // PWM Period --> needs to be adjustable
TA0CCTL1 = OUTMOD_2; // CCR1 reset/set
TA0CCR1 = CCR0/2; // CCR1 PWM duty cycle 50% -->needs to be adjustable
TACTL = TASSEL_1 + MC_1; // SMCLK, up mode
do
{
IFG1 &= ~OFIFG; // 清零SR中的振荡错误标志位OFIFG
for( i = 0; i < 100; i++ )
{
_NOP();
}
}
while (IFG1 & OFIFG); // 检查OFIFG是否清零
_NOP();
}
void IO_INIT(void)
{
P2SEL &= ~BIT4;
P2SEL2 &= ~BIT4;
P2REN &= ~BIT4;
P2DIR &= ~BIT4;
P2DIR |= BIT2;
P2IES |= BIT4;
P2IE |= BIT4;
P2IFG &= ~BIT1;
P2SEL &= ~(BIT0+BIT1);
P2SEL2 &= ~(BIT0+BIT1);
P2REN &= ~(BIT0+BIT1);
P2DIR &= ~(BIT0+BIT1);
P2DIR |= (BIT0+BIT1);
P2OUT &= ~(BIT0+BIT1);
P2SEL &= ~BIT2;
P2SEL2 &= ~BIT2;
P2REN &= ~BIT2;
P2DIR &= ~BIT1;
P2DIR |= BIT1;
P2OUT &= ~BIT2;
}
void main(void)//29uA
{
System_Clock_Init();
_NOP();
//WDTCTL = WDT_ARST_1000;//feed watch dog ?????下面的程序执行时间???
_NOP();
IO_INIT();
_NOP();
_EINT();//open all interrupt
_NOP();
LPM3;
_NOP();
while(1);
}
//------------------------------------------------------------------------------
//Function: Start Timer 0 A0 for Hour Timing 500ms
//------------------------------------------------------------------------------
#pragma vector = PORT2_VECTOR
#pragma vector = TIMER0_A1_VECTOR
__attribute__((__interrupt__(TIMER0_A0_VECTOR)))
void Timer0_A(void)
{
void delay ( unsigned int );
_NOP();
delay_us(20);
if( C_1 == 0xff)
{
if(!( P2IN & BIT4 )) C_2 = 0xff;
}
else
{
if(!( P2IN & BIT4 )) C_1 = 0xff;
}
if(( C_1 == 0xff) && ( C_2 == 0xff))
{
//output A B D
P2OUT |= BIT1;
P2OUT |= BIT2;
delay_ms(2);
P2OUT |= BIT1;
P2OUT &= ~BIT0;
delay_ms(2);
P2OUT |= BIT2;
P2OUT &= ~BIT1;
P2OUT |= BIT0;
//delay_ms(2);
P2OUT &= ~BIT2;
P2OUT &= ~BIT1;
// P2OUT |= BIT2;
delay_ms(2);
/* P2OUT |= BIT1;
P2OUT &= ~BIT2;
P2OUT |= BIT0;
//delay_ms(2);*/
P2OUT ^= BIT1; //P2 toggle
P2IFG &= ~BIT1; //IFG cleared
C_1 =0x00;
C_2 =0x00;
}
_NOP();
}
Output A & B

Output B & D